 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBendable Cuboid Robot Path Planning with Collision Avoidance using Generalized $L_p$ Norms
Paper and Code
Dec 16, 2017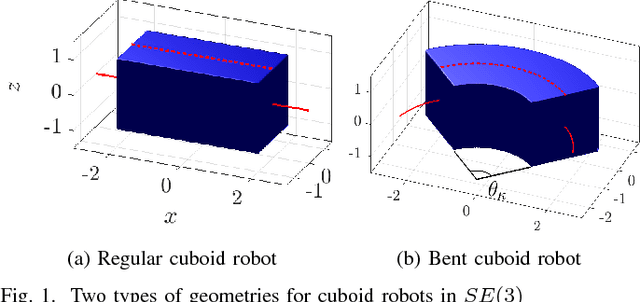
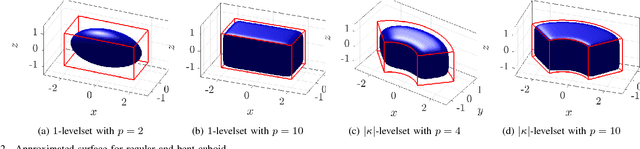
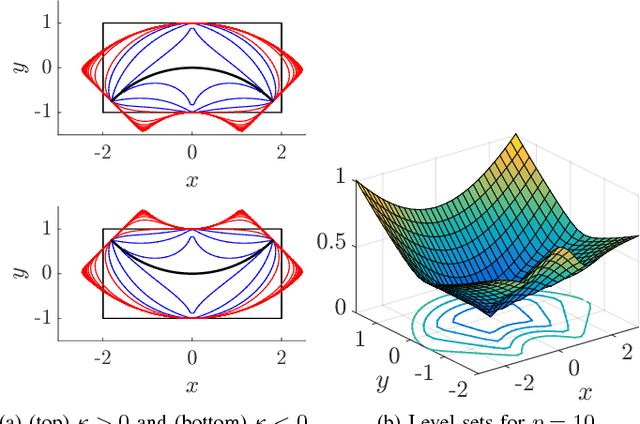
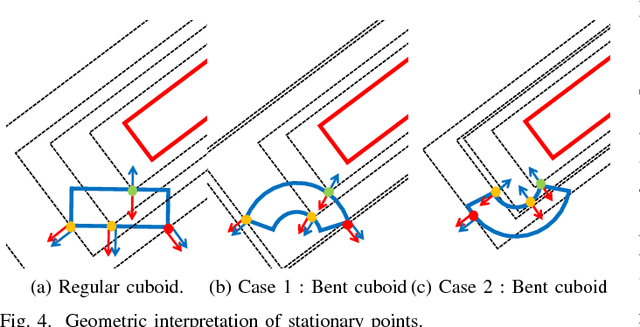
Optimal path planning problems for rigid and deformable (bendable) cuboid robots are considered by providing an analytic safety constraint using generalized $L_p$ norms. For regular cuboid robots, level sets of weighted $L_p$ norms generate implicit approximations of their surfaces. For bendable cuboid robots a weighted $L_p$ norm in polar coordinates implicitly approximates the surface boundary through a specified level set. Obstacle volumes, in the environment to navigate within, are presumed to be approximately described as sub-level sets of weighted $L_p$ norms. Using these approximate surface models, the optimal safe path planning problem is reformulated as a two stage optimization problem, where the safety constraint depends on a point on the robot which is closest to the obstacle in the obstacle's distance metric. A set of equality and inequality constraints are derived to replace the closest point problem, which is then defines additional analytic constraints on the original path planning problem. Combining all the analytic constraints with logical AND operations leads to a general optimal safe path planning problem. Numerically solving the problem involve conversion to a nonlinear programing problem. Simulations for rigid and bendable cuboid robot verify the proposed method.