 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Joint Filtering
Paper and Code
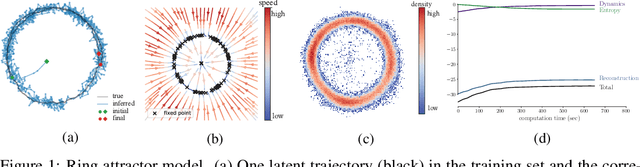
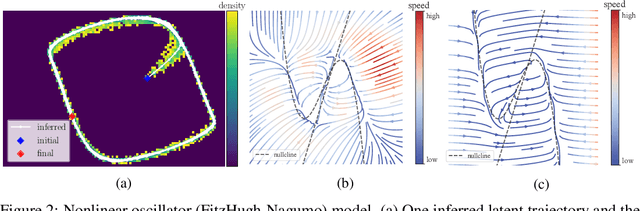
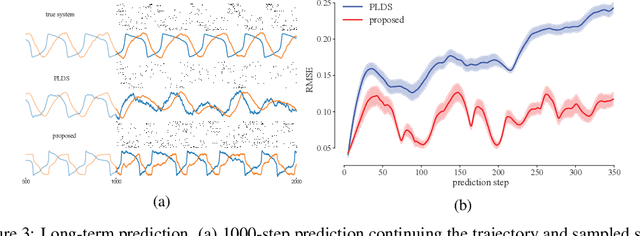
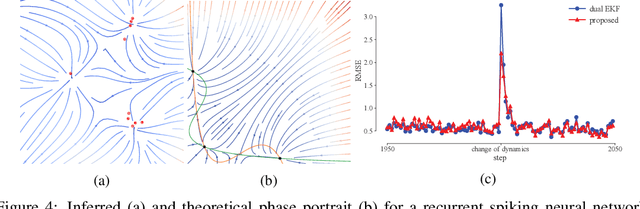
State space models provide an interpretable framework for complex time series by combining an intuitive dynamical system model with a probabilistic observation model. We developed a flexible online learning framework for latent nonlinear state dynamics and filtered latent states. Our method utilizes the stochastic gradient variational Bayes method to jointly optimize the parameters of the nonlinear dynamics, observation model, and the black-box recognition model. Unlike previous approaches, our framework can incorporate non-trivial observation noise models and has potential of inferring in real-time. We test our method on point process and Gaussian observations driven by continuous attractor dynamics and nonstationary systems, demonstrating its ability to recover the phase portrait, filtered trajectory, and produce long-term predictions for online machine learning.