 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end Global to Local CNN Learning for Hand Pose Recovery in Depth Data
Paper and Code
Apr 11, 2018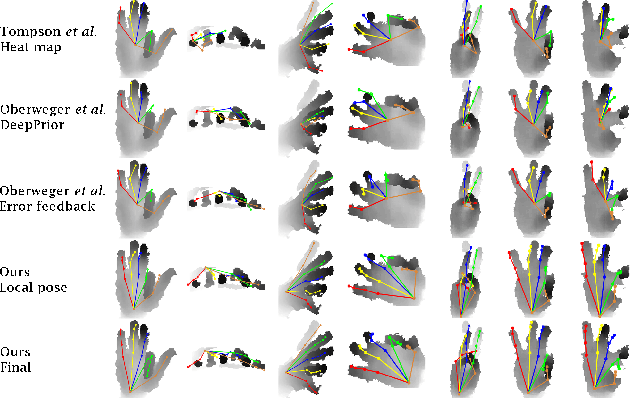
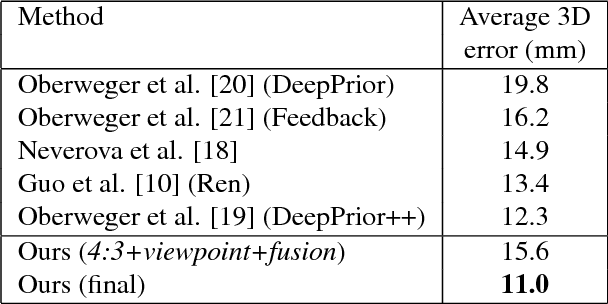
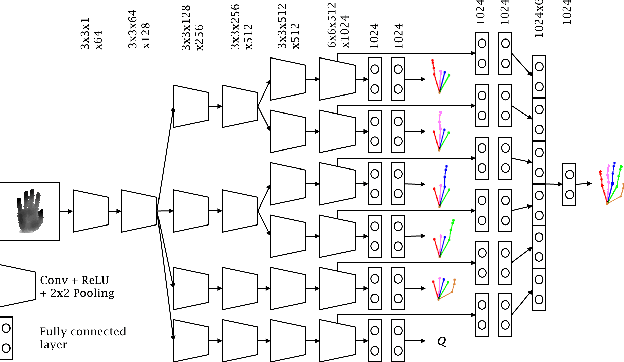
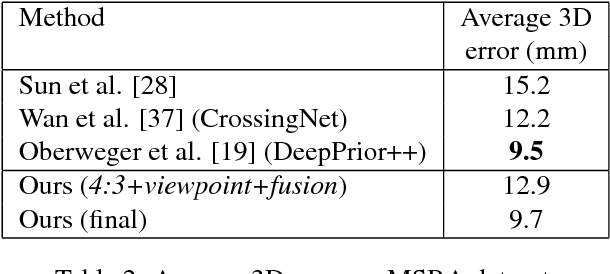
Despite recent advances in 3D pose estimation of human hands, especially thanks to the advent of CNNs and depth cameras, this task is still far from being solved. This is mainly due to the highly non-linear dynamics of fingers, which make hand model training a challenging task. In this paper, we exploit a novel hierarchical tree-like structured CNN, in which branches are trained to become specialized in predefined subsets of hand joints, called local poses. We further fuse local pose features, extracted from hierarchical CNN branches, to learn higher order dependencies among joints in the final pose by end-to-end training. Lastly, the loss function used is also defined to incorporate appearance and physical constraints about doable hand motion and deformation. Finally, we introduce a non-rigid data augmentation approach to increase the amount of training depth data. Experimental results suggest that feeding a tree-shaped CNN, specialized in local poses, into a fusion network for modeling joints correlations and dependencies, helps to increase the precision of final estimations, outperforming state-of-the-art results on NYU and SyntheticHand datasets.