 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActor-Critic Reinforcement Learning with Simultaneous Human Control and Feedback
Paper and Code
Mar 15, 2017
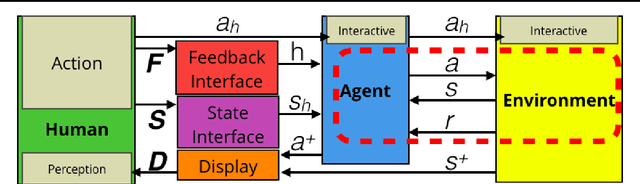
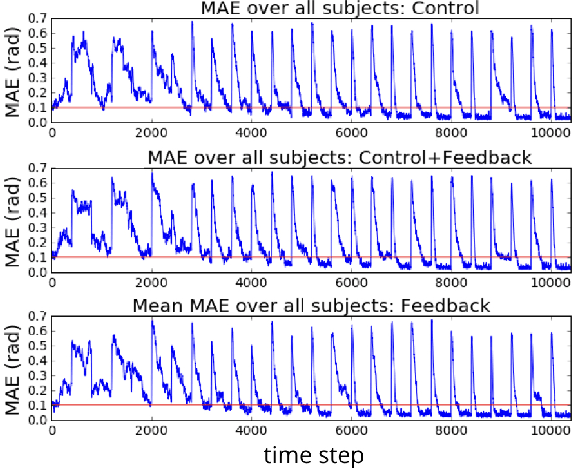
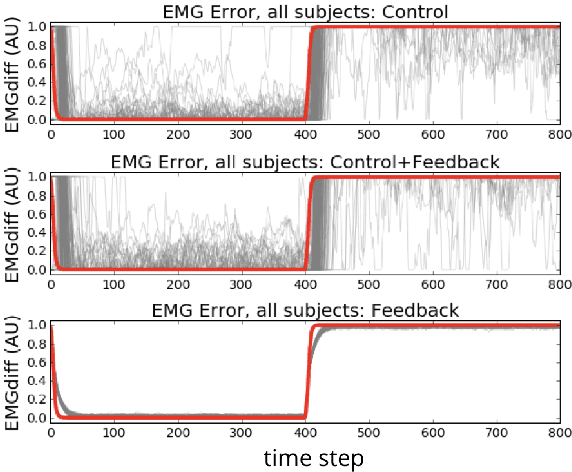
This paper contributes a first study into how different human users deliver simultaneous control and feedback signals during human-robot interaction. As part of this work, we formalize and present a general interactive learning framework for online cooperation between humans and reinforcement learning agents. In many human-machine interaction settings, there is a growing gap between the degrees-of-freedom of complex semi-autonomous systems and the number of human control channels. Simple human control and feedback mechanisms are required to close this gap and allow for better collaboration between humans and machines on complex tasks. To better inform the design of concurrent control and feedback interfaces, we present experimental results from a human-robot collaborative domain wherein the human must simultaneously deliver both control and feedback signals to interactively train an actor-critic reinforcement learning robot. We compare three experimental conditions: 1) human delivered control signals, 2) reward-shaping feedback signals, and 3) simultaneous control and feedback. Our results suggest that subjects provide less feedback when simultaneously delivering feedback and control signals and that control signal quality is not significantly diminished. Our data suggest that subjects may also modify when and how they provide feedback. Through algorithmic development and tuning informed by this study, we expect semi-autonomous actions of robotic agents can be better shaped by human feedback, allowing for seamless collaboration and improved performance in difficult interactive domains.