 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Swarm Control from Spatio-Temporal Specifications
Paper and Code
Sep 20, 2016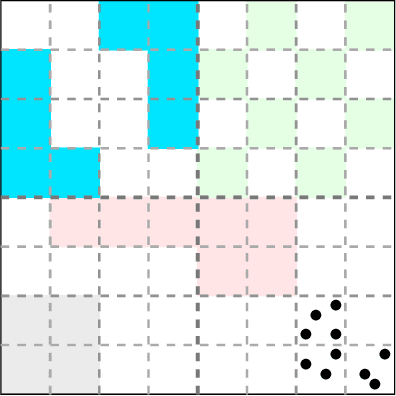
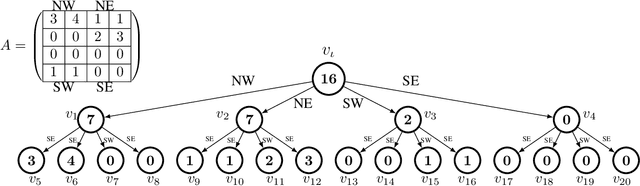
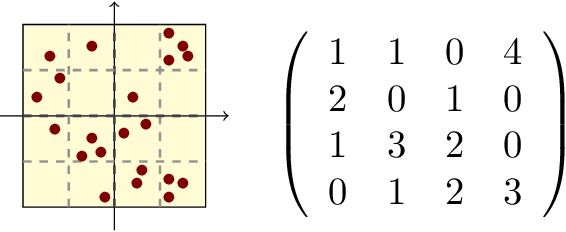
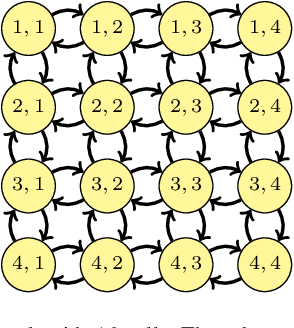
In this paper, we study the problem of controlling a two-dimensional robotic swarm with the purpose of achieving high level and complex spatio-temporal patterns. We use a rich spatio-temporal logic that is capable of describing a wide range of time varying and complex spatial configurations, and develop a method to encode such formal specifications as a set of mixed integer linear constraints, which are incorporated into a mixed integer linear programming problem. We plan trajectories for each individual robot such that the whole swarm satisfies the spatio-temporal requirements, while optimizing total robot movement and/or a metric that shows how strongly the swarm trajectory resembles given spatio-temporal behaviors. An illustrative case study is included.