 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReduced Memory Region Based Deep Convolutional Neural Network Detection
Paper and Code

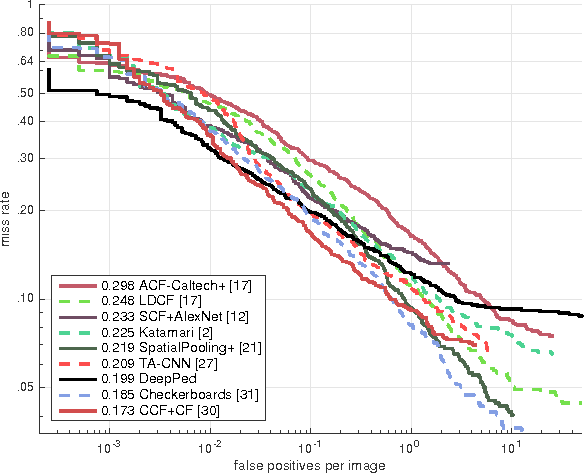
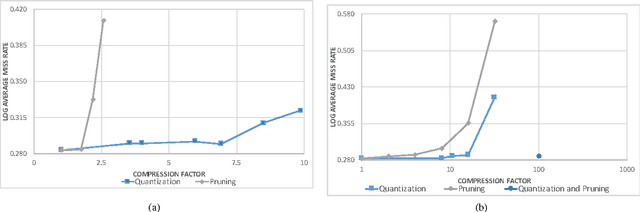
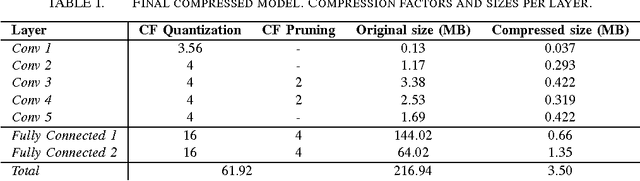
Accurate pedestrian detection has a primary role in automotive safety: for example, by issuing warnings to the driver or acting actively on car's brakes, it helps decreasing the probability of injuries and human fatalities. In order to achieve very high accuracy, recent pedestrian detectors have been based on Convolutional Neural Networks (CNN). Unfortunately, such approaches require vast amounts of computational power and memory, preventing efficient implementations on embedded systems. This work proposes a CNN-based detector, adapting a general-purpose convolutional network to the task at hand. By thoroughly analyzing and optimizing each step of the detection pipeline, we develop an architecture that outperforms methods based on traditional image features and achieves an accuracy close to the state-of-the-art while having low computational complexity. Furthermore, the model is compressed in order to fit the tight constrains of low power devices with a limited amount of embedded memory available. This paper makes two main contributions: (1) it proves that a region based deep neural network can be finely tuned to achieve adequate accuracy for pedestrian detection (2) it achieves a very low memory usage without reducing detection accuracy on the Caltech Pedestrian dataset.