 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Objective Design of State Feedback Controllers Using Reinforced Quantum-Behaved Particle Swarm Optimization
Paper and Code
Jul 04, 2016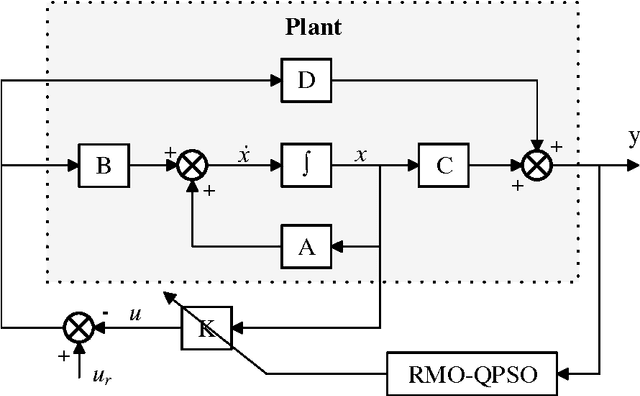
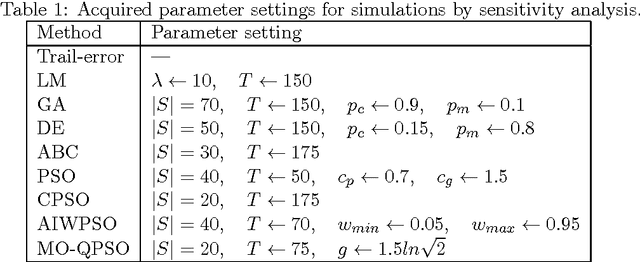
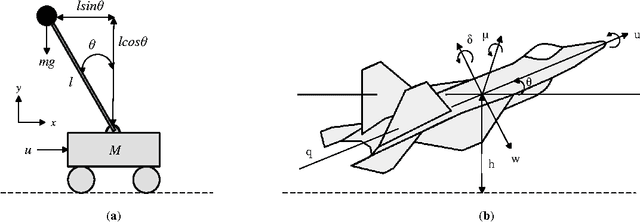
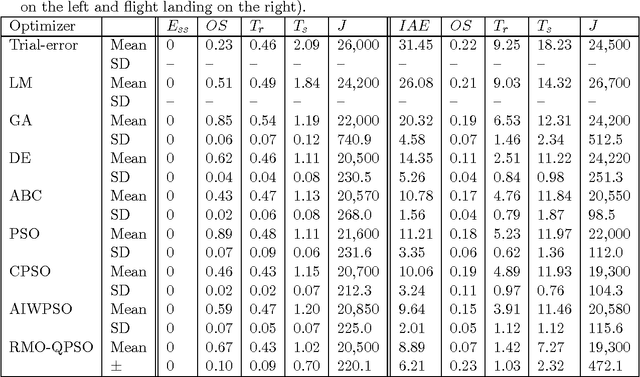
In this paper, a novel and generic multi-objective design paradigm is proposed which utilizes quantum-behaved PSO(QPSO) for deciding the optimal configuration of the LQR controller for a given problem considering a set of competing objectives. There are three main contributions introduced in this paper as follows. (1) The standard QPSO algorithm is reinforced with an informed initialization scheme based on the simulated annealing algorithm and Gaussian neighborhood selection mechanism. (2) It is also augmented with a local search strategy which integrates the advantages of memetic algorithm into conventional QPSO. (3) An aggregated dynamic weighting criterion is introduced that dynamically combines the soft and hard constraints with control objectives to provide the designer with a set of Pareto optimal solutions and lets her to decide the target solution based on practical preferences. The proposed method is compared against a gradient-based method, seven meta-heuristics, and the trial-and-error method on two control benchmarks using sensitivity analysis and full factorial parameter selection and the results are validated using one-tailed T-test. The experimental results suggest that the proposed method outperforms opponent methods in terms of controller effort, measures associated with transient response and criteria related to steady-state.