 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep convolutional neural networks for pedestrian detection
Paper and Code
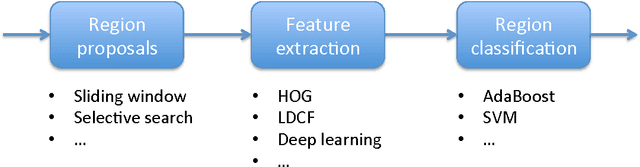

Pedestrian detection is a popular research topic due to its paramount importance for a number of applications, especially in the fields of automotive, surveillance and robotics. Despite the significant improvements, pedestrian detection is still an open challenge that calls for more and more accurate algorithms. In the last few years, deep learning and in particular convolutional neural networks emerged as the state of the art in terms of accuracy for a number of computer vision tasks such as image classification, object detection and segmentation, often outperforming the previous gold standards by a large margin. In this paper, we propose a pedestrian detection system based on deep learning, adapting a general-purpose convolutional network to the task at hand. By thoroughly analyzing and optimizing each step of the detection pipeline we propose an architecture that outperforms traditional methods, achieving a task accuracy close to that of state-of-the-art approaches, while requiring a low computational time. Finally, we tested the system on an NVIDIA Jetson TK1, a 192-core platform that is envisioned to be a forerunner computational brain of future self-driving cars.