 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Compressed Sensing Kalman Filter for Direction of Arrival Estimation
Paper and Code
Sep 21, 2015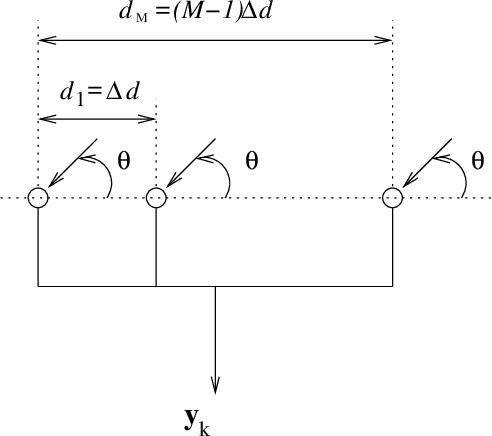
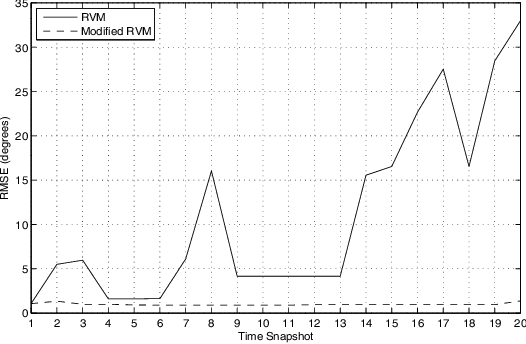
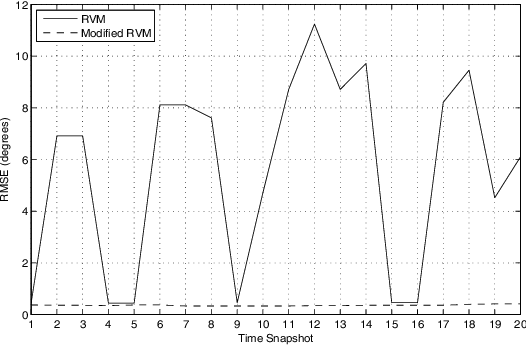
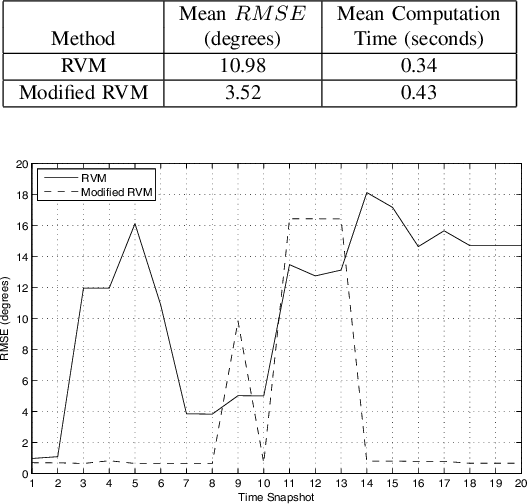
In this paper, we look to address the problem of estimating the dynamic direction of arrival (DOA) of a narrowband signal impinging on a sensor array from the far field. The initial estimate is made using a Bayesian compressive sensing (BCS) framework and then tracked using a Bayesian compressed sensing Kalman filter (BCSKF). The BCS framework splits the angular region into N potential DOAs and enforces a belief that only a few of the DOAs will have a non-zero valued signal present. A BCSKF can then be used to track the change in the DOA using the same framework. There can be an issue when the DOA approaches the endfire of the array. In this angular region current methods can struggle to accurately estimate and track changes in the DOAs. To tackle this problem, we propose changing the traditional sparse belief associated with BCS to a belief that the estimated signals will match the predicted signals given a known DOA change. This is done by modelling the difference between the expected sparse received signals and the estimated sparse received signals as a Gaussian distribution. Example test scenarios are provided and comparisons made with the traditional BCS based estimation method. They show that an improvement in estimation accuracy is possible without a significant increase in computational complexity.