Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle filter-based Gaussian process optimisation for parameter inference
Paper and Code
Mar 31, 2014
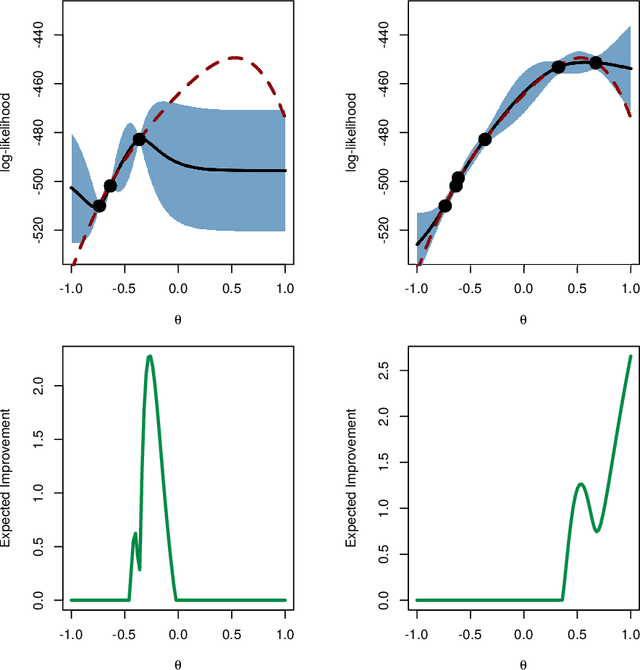
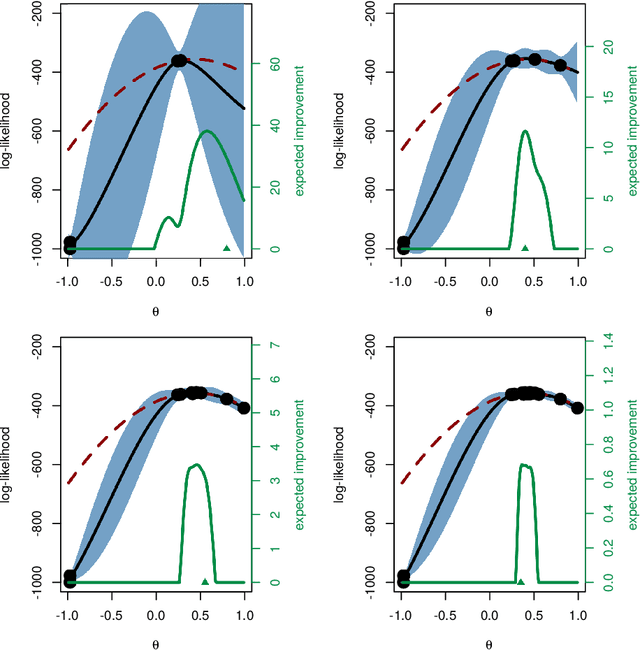
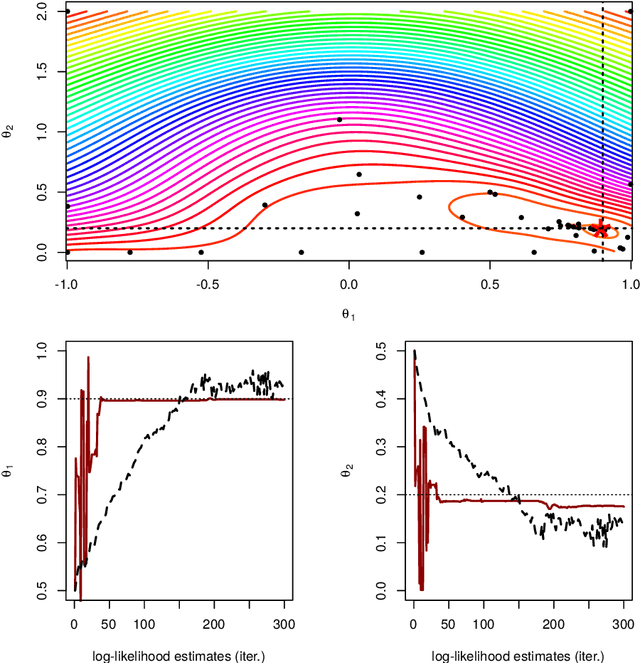
We propose a novel method for maximum likelihood-based parameter inference in nonlinear and/or non-Gaussian state space models. The method is an iterative procedure with three steps. At each iteration a particle filter is used to estimate the value of the log-likelihood function at the current parameter iterate. Using these log-likelihood estimates, a surrogate objective function is created by utilizing a Gaussian process model. Finally, we use a heuristic procedure to obtain a revised parameter iterate, providing an automatic trade-off between exploration and exploitation of the surrogate model. The method is profiled on two state space models with good performance both considering accuracy and computational cost.
* Accepted for publication in proceedings of the 19th World Congress of
the International Federation of Automatic Control (IFAC), Cape Town, South
Africa, August 2014. 6 pages, 4 figures
View paper on