 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding a needle in an exponential haystack: Discrete RRT for exploration of implicit roadmaps in multi-robot motion planning
Paper and Code
Mar 30, 2014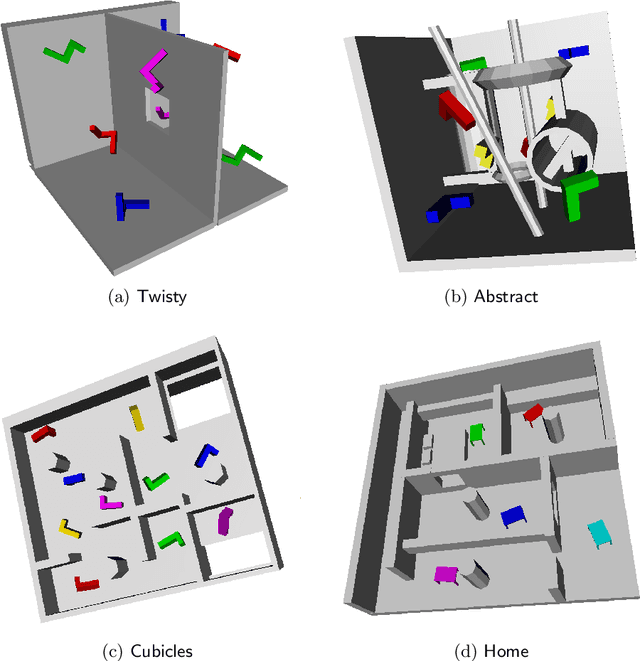
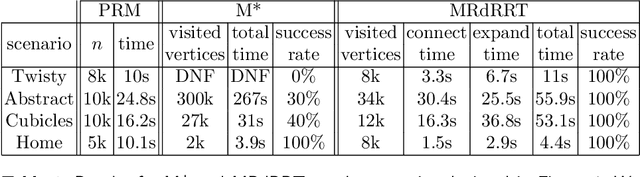
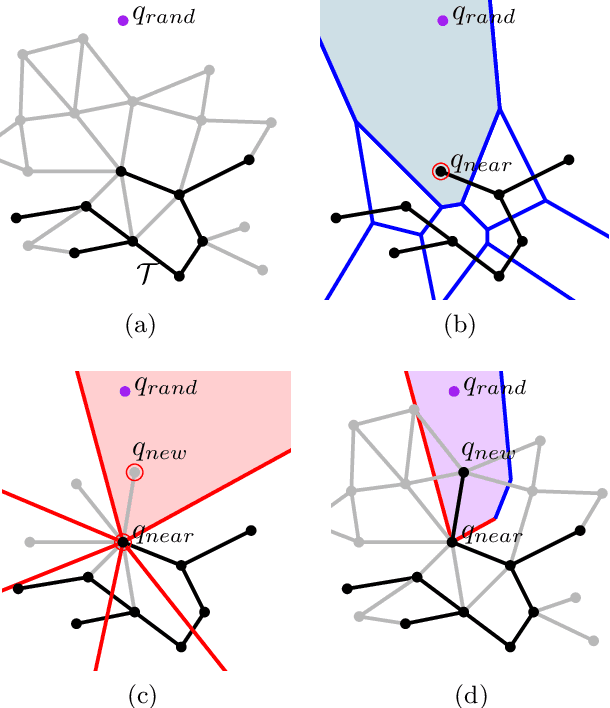
We present a sampling-based framework for multi-robot motion planning which combines an implicit representation of a roadmap with a novel approach for pathfinding in geometrically embedded graphs tailored for our setting. Our pathfinding algorithm, discrete-RRT (dRRT), is an adaptation of the celebrated RRT algorithm for the discrete case of a graph, and it enables a rapid exploration of the high-dimensional configuration space by carefully walking through an implicit representation of a tensor product of roadmaps for the individual robots. We demonstrate our approach experimentally on scenarios of up to 60 degrees of freedom where our algorithm is faster by a factor of at least ten when compared to existing algorithms that we are aware of.