 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWojciech Zaremba
Multi-Goal Reinforcement Learning: Challenging Robotics Environments and Request for Research
Mar 10, 2018

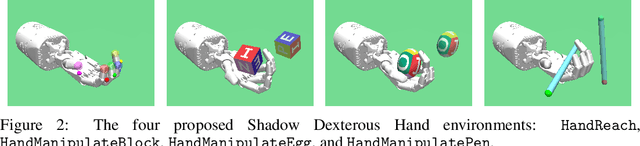
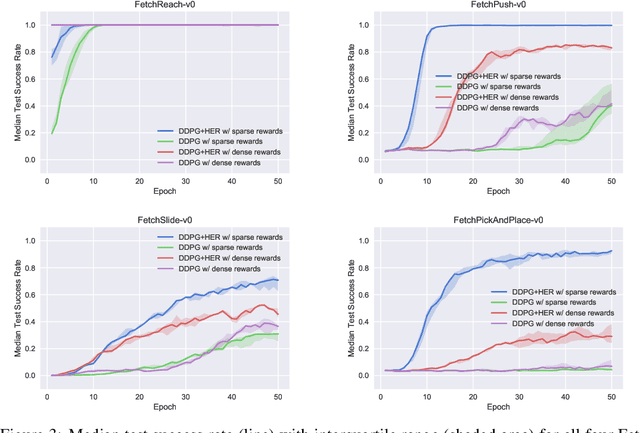
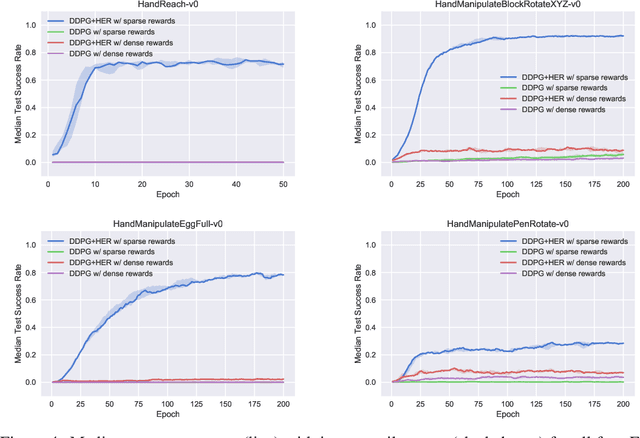
The purpose of this technical report is two-fold. First of all, it introduces a suite of challenging continuous control tasks (integrated with OpenAI Gym) based on currently existing robotics hardware. The tasks include pushing, sliding and pick & place with a Fetch robotic arm as well as in-hand object manipulation with a Shadow Dexterous Hand. All tasks have sparse binary rewards and follow a Multi-Goal Reinforcement Learning (RL) framework in which an agent is told what to do using an additional input. The second part of the paper presents a set of concrete research ideas for improving RL algorithms, most of which are related to Multi-Goal RL and Hindsight Experience Replay.
Sim-to-Real Transfer of Robotic Control with Dynamics Randomization
Mar 03, 2018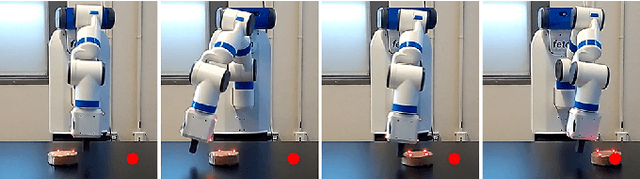
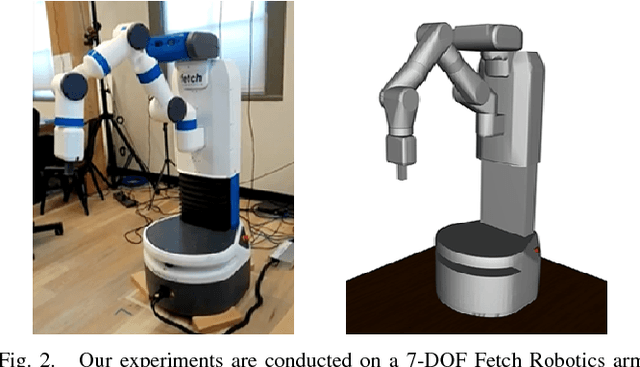
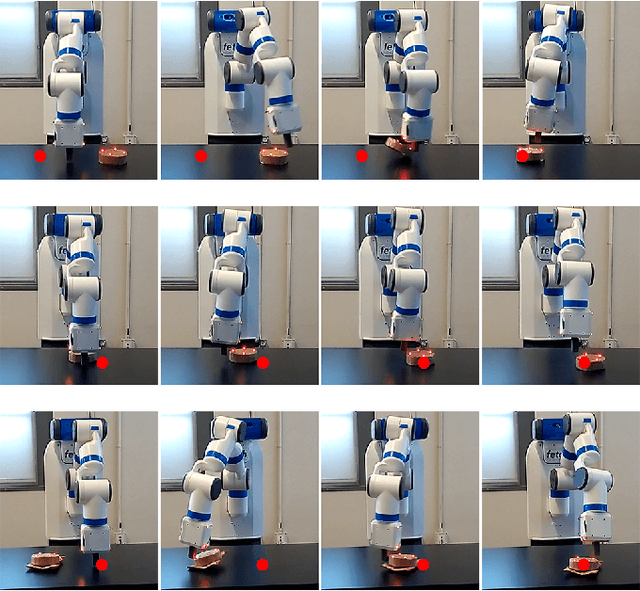
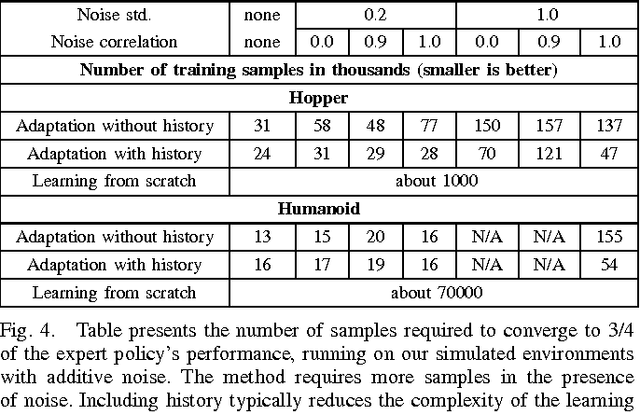
Simulations are attractive environments for training agents as they provide an abundant source of data and alleviate certain safety concerns during the training process. But the behaviours developed by agents in simulation are often specific to the characteristics of the simulator. Due to modeling error, strategies that are successful in simulation may not transfer to their real world counterparts. In this paper, we demonstrate a simple method to bridge this "reality gap". By randomizing the dynamics of the simulator during training, we are able to develop policies that are capable of adapting to very different dynamics, including ones that differ significantly from the dynamics on which the policies were trained. This adaptivity enables the policies to generalize to the dynamics of the real world without any training on the physical system. Our approach is demonstrated on an object pushing task using a robotic arm. Despite being trained exclusively in simulation, our policies are able to maintain a similar level of performance when deployed on a real robot, reliably moving an object to a desired location from random initial configurations. We explore the impact of various design decisions and show that the resulting policies are robust to significant calibration error.
Overcoming Exploration in Reinforcement Learning with Demonstrations
Feb 25, 2018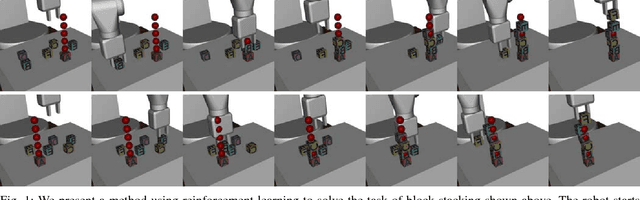
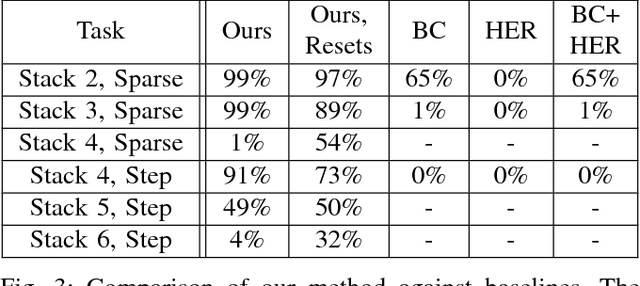
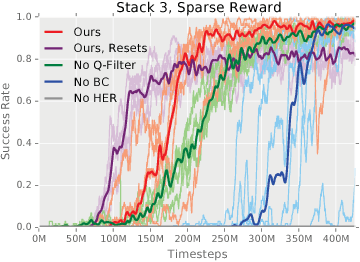
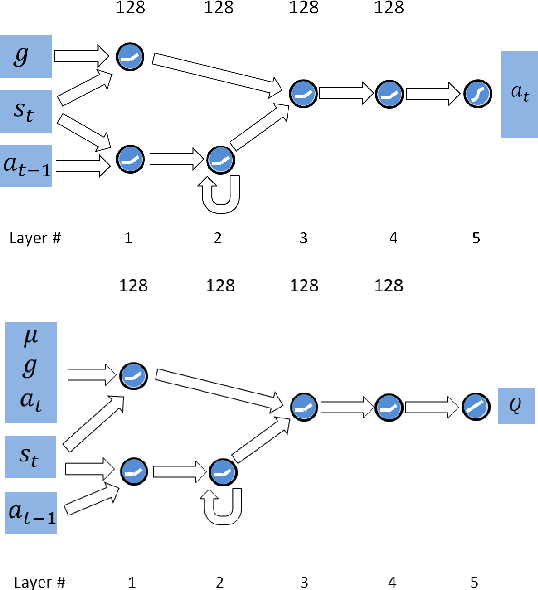
Exploration in environments with sparse rewards has been a persistent problem in reinforcement learning (RL). Many tasks are natural to specify with a sparse reward, and manually shaping a reward function can result in suboptimal performance. However, finding a non-zero reward is exponentially more difficult with increasing task horizon or action dimensionality. This puts many real-world tasks out of practical reach of RL methods. In this work, we use demonstrations to overcome the exploration problem and successfully learn to perform long-horizon, multi-step robotics tasks with continuous control such as stacking blocks with a robot arm. Our method, which builds on top of Deep Deterministic Policy Gradients and Hindsight Experience Replay, provides an order of magnitude of speedup over RL on simulated robotics tasks. It is simple to implement and makes only the additional assumption that we can collect a small set of demonstrations. Furthermore, our method is able to solve tasks not solvable by either RL or behavior cloning alone, and often ends up outperforming the demonstrator policy.
Hindsight Experience Replay
Feb 23, 2018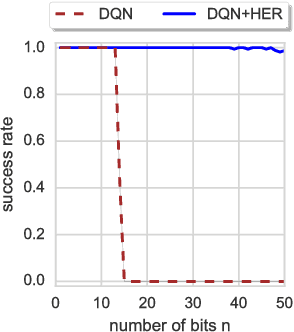
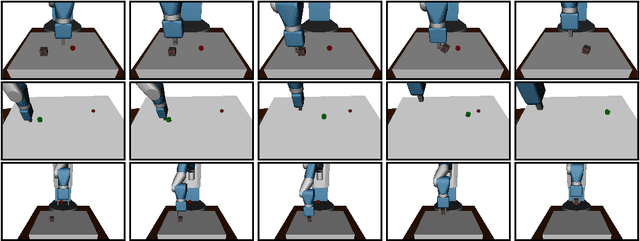
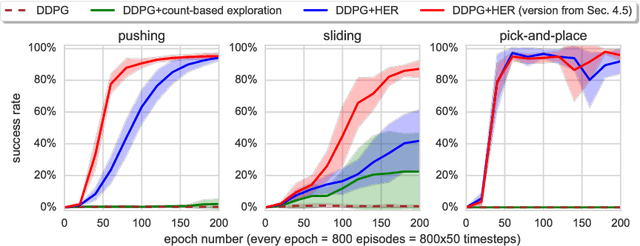
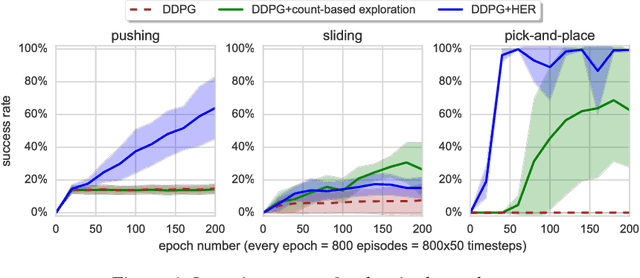
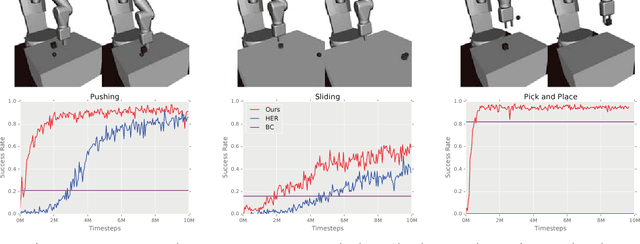
Dealing with sparse rewards is one of the biggest challenges in Reinforcement Learning (RL). We present a novel technique called Hindsight Experience Replay which allows sample-efficient learning from rewards which are sparse and binary and therefore avoid the need for complicated reward engineering. It can be combined with an arbitrary off-policy RL algorithm and may be seen as a form of implicit curriculum. We demonstrate our approach on the task of manipulating objects with a robotic arm. In particular, we run experiments on three different tasks: pushing, sliding, and pick-and-place, in each case using only binary rewards indicating whether or not the task is completed. Our ablation studies show that Hindsight Experience Replay is a crucial ingredient which makes training possible in these challenging environments. We show that our policies trained on a physics simulation can be deployed on a physical robot and successfully complete the task.
One-Shot Imitation Learning
Dec 04, 2017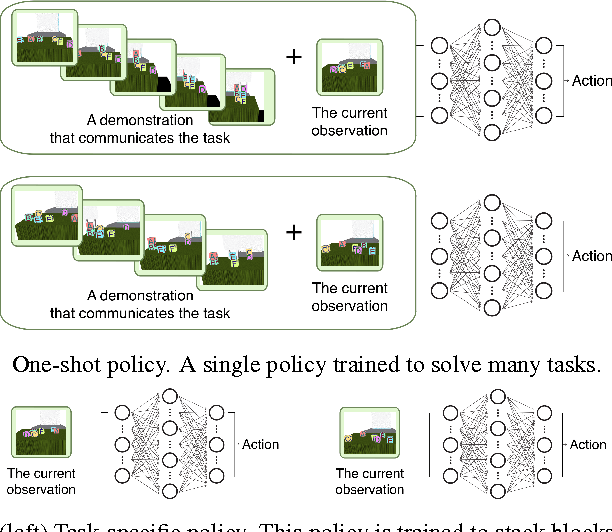
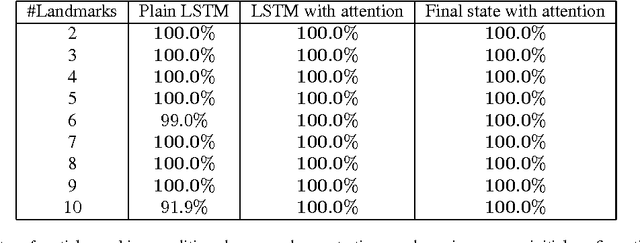
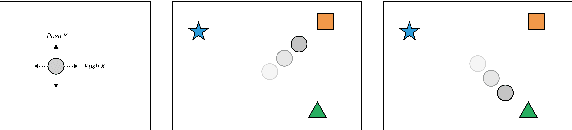
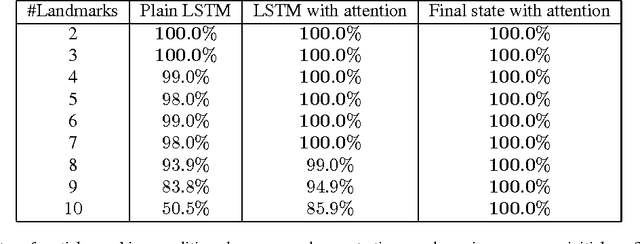
Imitation learning has been commonly applied to solve different tasks in isolation. This usually requires either careful feature engineering, or a significant number of samples. This is far from what we desire: ideally, robots should be able to learn from very few demonstrations of any given task, and instantly generalize to new situations of the same task, without requiring task-specific engineering. In this paper, we propose a meta-learning framework for achieving such capability, which we call one-shot imitation learning. Specifically, we consider the setting where there is a very large set of tasks, and each task has many instantiations. For example, a task could be to stack all blocks on a table into a single tower, another task could be to place all blocks on a table into two-block towers, etc. In each case, different instances of the task would consist of different sets of blocks with different initial states. At training time, our algorithm is presented with pairs of demonstrations for a subset of all tasks. A neural net is trained that takes as input one demonstration and the current state (which initially is the initial state of the other demonstration of the pair), and outputs an action with the goal that the resulting sequence of states and actions matches as closely as possible with the second demonstration. At test time, a demonstration of a single instance of a new task is presented, and the neural net is expected to perform well on new instances of this new task. The use of soft attention allows the model to generalize to conditions and tasks unseen in the training data. We anticipate that by training this model on a much greater variety of tasks and settings, we will obtain a general system that can turn any demonstrations into robust policies that can accomplish an overwhelming variety of tasks. Videos available at https://bit.ly/nips2017-oneshot .
Asymmetric Actor Critic for Image-Based Robot Learning
Oct 18, 2017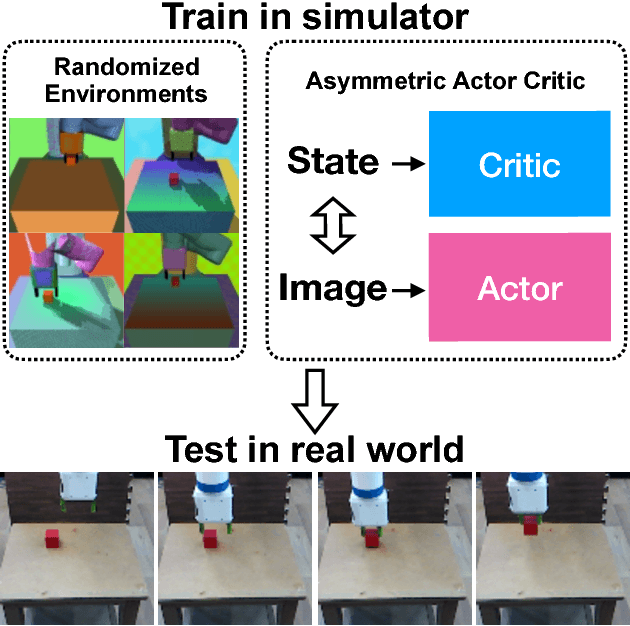
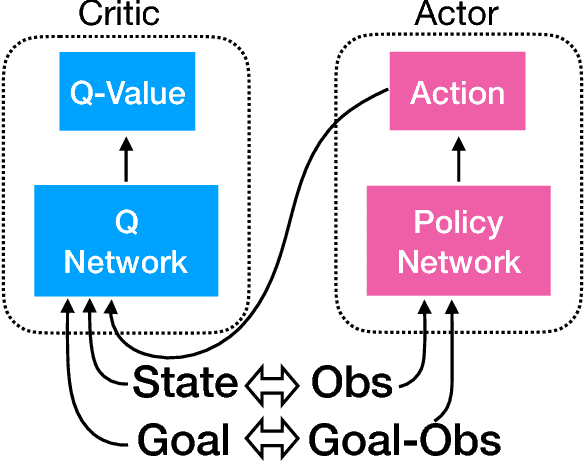
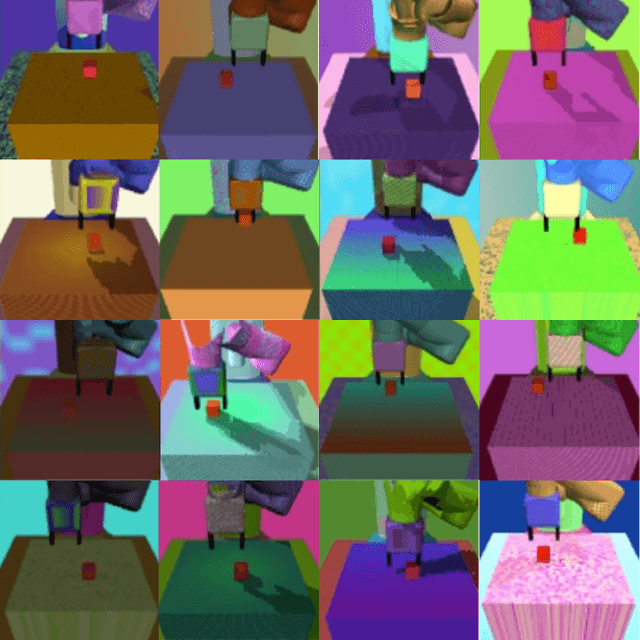

Deep reinforcement learning (RL) has proven a powerful technique in many sequential decision making domains. However, Robotics poses many challenges for RL, most notably training on a physical system can be expensive and dangerous, which has sparked significant interest in learning control policies using a physics simulator. While several recent works have shown promising results in transferring policies trained in simulation to the real world, they often do not fully utilize the advantage of working with a simulator. In this work, we exploit the full state observability in the simulator to train better policies which take as input only partial observations (RGBD images). We do this by employing an actor-critic training algorithm in which the critic is trained on full states while the actor (or policy) gets rendered images as input. We show experimentally on a range of simulated tasks that using these asymmetric inputs significantly improves performance. Finally, we combine this method with domain randomization and show real robot experiments for several tasks like picking, pushing, and moving a block. We achieve this simulation to real world transfer without training on any real world data.
Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World
Mar 20, 2017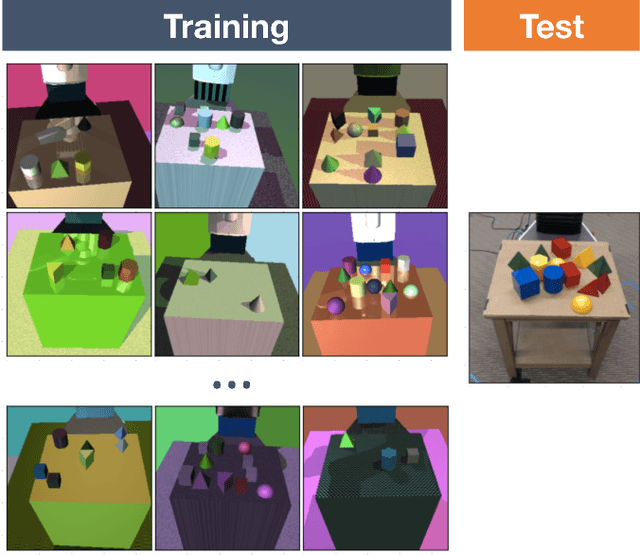
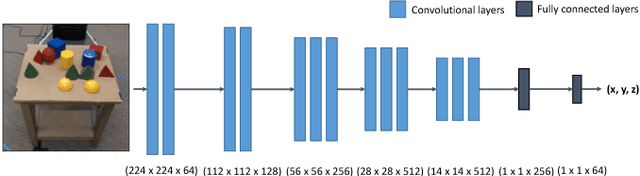
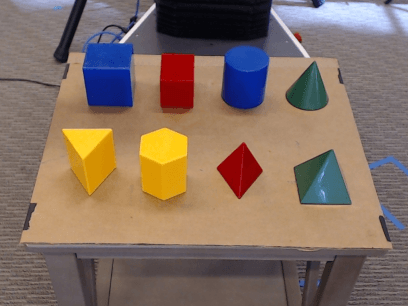
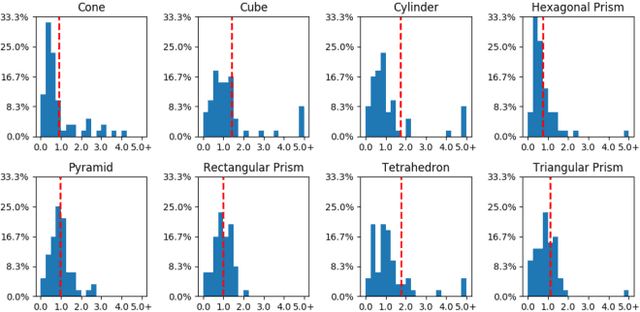
Bridging the 'reality gap' that separates simulated robotics from experiments on hardware could accelerate robotic research through improved data availability. This paper explores domain randomization, a simple technique for training models on simulated images that transfer to real images by randomizing rendering in the simulator. With enough variability in the simulator, the real world may appear to the model as just another variation. We focus on the task of object localization, which is a stepping stone to general robotic manipulation skills. We find that it is possible to train a real-world object detector that is accurate to $1.5$cm and robust to distractors and partial occlusions using only data from a simulator with non-realistic random textures. To demonstrate the capabilities of our detectors, we show they can be used to perform grasping in a cluttered environment. To our knowledge, this is the first successful transfer of a deep neural network trained only on simulated RGB images (without pre-training on real images) to the real world for the purpose of robotic control.
Extensions and Limitations of the Neural GPU
Nov 04, 2016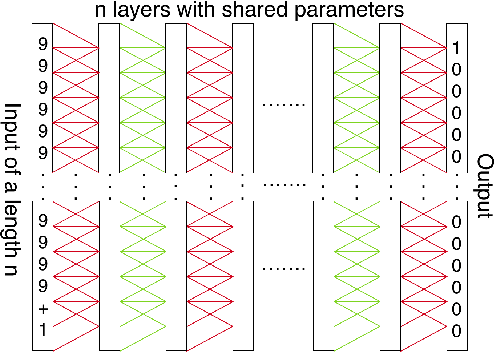

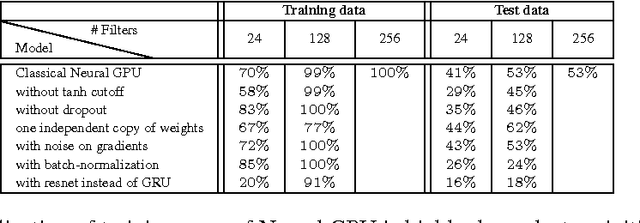
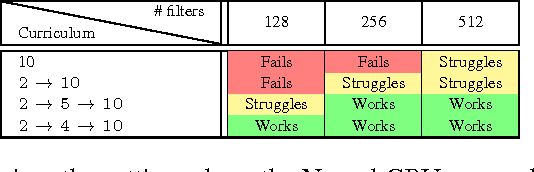
The Neural GPU is a recent model that can learn algorithms such as multi-digit binary addition and binary multiplication in a way that generalizes to inputs of arbitrary length. We show that there are two simple ways of improving the performance of the Neural GPU: by carefully designing a curriculum, and by increasing model size. The latter requires a memory efficient implementation, as a naive implementation of the Neural GPU is memory intensive. We find that these techniques increase the set of algorithmic problems that can be solved by the Neural GPU: we have been able to learn to perform all the arithmetic operations (and generalize to arbitrarily long numbers) when the arguments are given in the decimal representation (which, surprisingly, has not been possible before). We have also been able to train the Neural GPU to evaluate long arithmetic expressions with multiple operands that require respecting the precedence order of the operands, although these have succeeded only in their binary representation, and not with perfect accuracy. In addition, we gain insight into the Neural GPU by investigating its failure modes. We find that Neural GPUs that correctly generalize to arbitrarily long numbers still fail to compute the correct answer on highly-symmetric, atypical inputs: for example, a Neural GPU that achieves near-perfect generalization on decimal multiplication of up to 100-digit long numbers can fail on $000000\dots002 \times 000000\dots002$ while succeeding at $2 \times 2$. These failure modes are reminiscent of adversarial examples.
Transfer from Simulation to Real World through Learning Deep Inverse Dynamics Model
Oct 11, 2016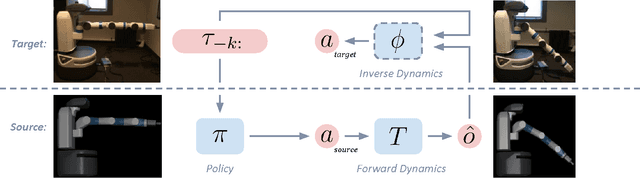
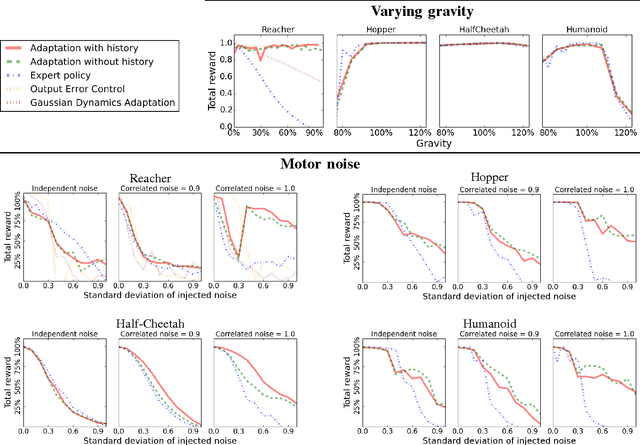
Developing control policies in simulation is often more practical and safer than directly running experiments in the real world. This applies to policies obtained from planning and optimization, and even more so to policies obtained from reinforcement learning, which is often very data demanding. However, a policy that succeeds in simulation often doesn't work when deployed on a real robot. Nevertheless, often the overall gist of what the policy does in simulation remains valid in the real world. In this paper we investigate such settings, where the sequence of states traversed in simulation remains reasonable for the real world, even if the details of the controls are not, as could be the case when the key differences lie in detailed friction, contact, mass and geometry properties. During execution, at each time step our approach computes what the simulation-based control policy would do, but then, rather than executing these controls on the real robot, our approach computes what the simulation expects the resulting next state(s) will be, and then relies on a learned deep inverse dynamics model to decide which real-world action is most suitable to achieve those next states. Deep models are only as good as their training data, and we also propose an approach for data collection to (incrementally) learn the deep inverse dynamics model. Our experiments shows our approach compares favorably with various baselines that have been developed for dealing with simulation to real world model discrepancy, including output error control and Gaussian dynamics adaptation.
Improved Techniques for Training GANs
Jun 10, 2016
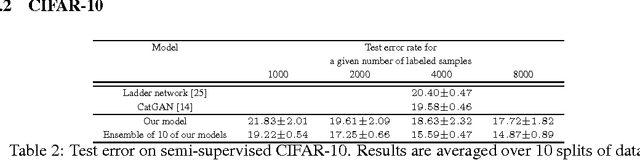
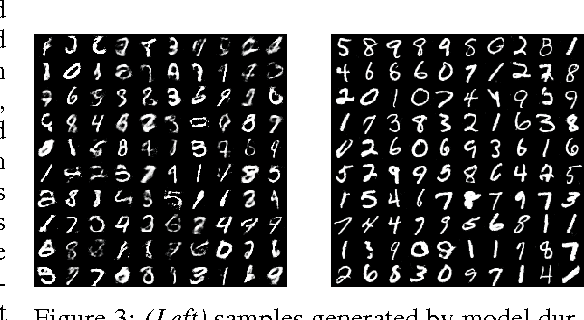

We present a variety of new architectural features and training procedures that we apply to the generative adversarial networks (GANs) framework. We focus on two applications of GANs: semi-supervised learning, and the generation of images that humans find visually realistic. Unlike most work on generative models, our primary goal is not to train a model that assigns high likelihood to test data, nor do we require the model to be able to learn well without using any labels. Using our new techniques, we achieve state-of-the-art results in semi-supervised classification on MNIST, CIFAR-10 and SVHN. The generated images are of high quality as confirmed by a visual Turing test: our model generates MNIST samples that humans cannot distinguish from real data, and CIFAR-10 samples that yield a human error rate of 21.3%. We also present ImageNet samples with unprecedented resolution and show that our methods enable the model to learn recognizable features of ImageNet classes.