 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaFuse: Adaptive Multiview Fusion for Accurate Human Pose Estimation in the Wild
Oct 26, 2020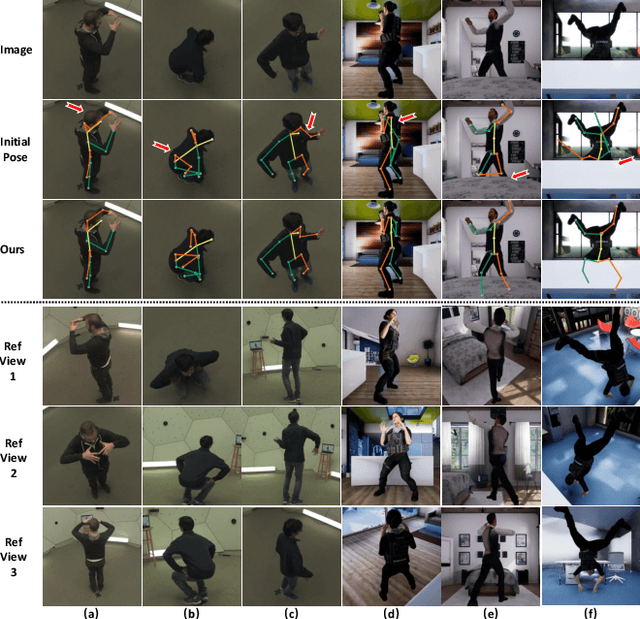
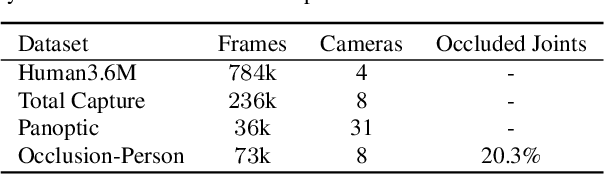
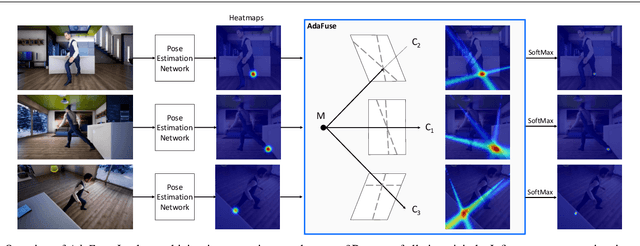

Occlusion is probably the biggest challenge for human pose estimation in the wild. Typical solutions often rely on intrusive sensors such as IMUs to detect occluded joints. To make the task truly unconstrained, we present AdaFuse, an adaptive multiview fusion method, which can enhance the features in occluded views by leveraging those in visible views. The core of AdaFuse is to determine the point-point correspondence between two views which we solve effectively by exploring the sparsity of the heatmap representation. We also learn an adaptive fusion weight for each camera view to reflect its feature quality in order to reduce the chance that good features are undesirably corrupted by ``bad'' views. The fusion model is trained end-to-end with the pose estimation network, and can be directly applied to new camera configurations without additional adaptation. We extensively evaluate the approach on three public datasets including Human3.6M, Total Capture and CMU Panoptic. It outperforms the state-of-the-arts on all of them. We also create a large scale synthetic dataset Occlusion-Person, which allows us to perform numerical evaluation on the occluded joints, as it provides occlusion labels for every joint in the images. The dataset and code are released at https://github.com/zhezh/adafuse-3d-human-pose.
Fusing Wearable IMUs with Multi-View Images for Human Pose Estimation: A Geometric Approach
Apr 10, 2020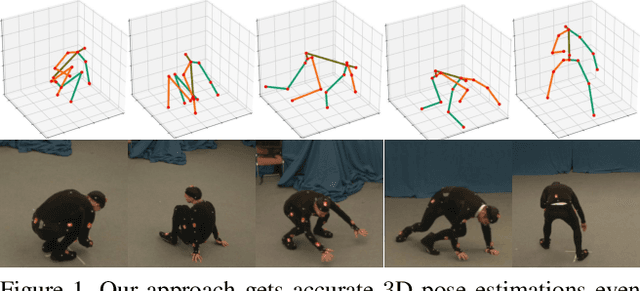
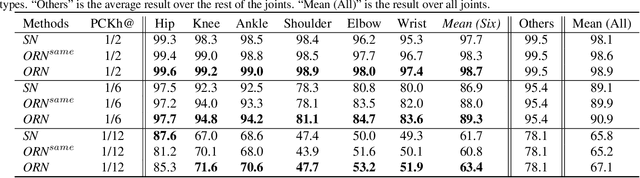
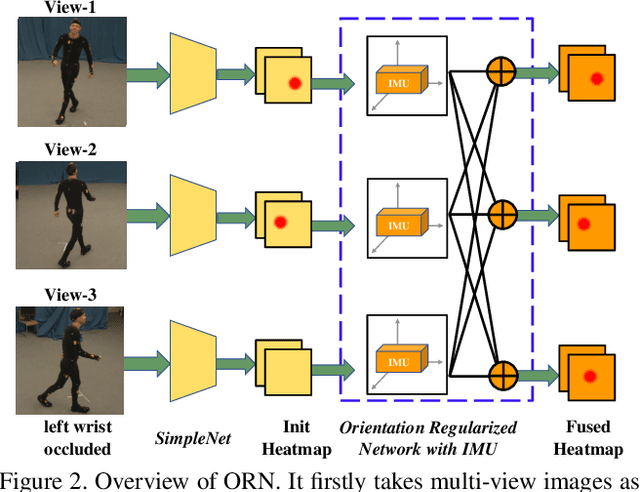

We propose to estimate 3D human pose from multi-view images and a few IMUs attached at person's limbs. It operates by firstly detecting 2D poses from the two signals, and then lifting them to the 3D space. We present a geometric approach to reinforce the visual features of each pair of joints based on the IMUs. This notably improves 2D pose estimation accuracy especially when one joint is occluded. We call this approach Orientation Regularized Network (ORN). Then we lift the multi-view 2D poses to the 3D space by an Orientation Regularized Pictorial Structure Model (ORPSM) which jointly minimizes the projection error between the 3D and 2D poses, along with the discrepancy between the 3D pose and IMU orientations. The simple two-step approach reduces the error of the state-of-the-art by a large margin on a public dataset. Our code will be released at https://github.com/CHUNYUWANG/imu-human-pose-pytorch.