 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVijay Kumar
LE3D: A Lightweight Ensemble Framework of Data Drift Detectors for Resource-Constrained Devices
Nov 18, 2022
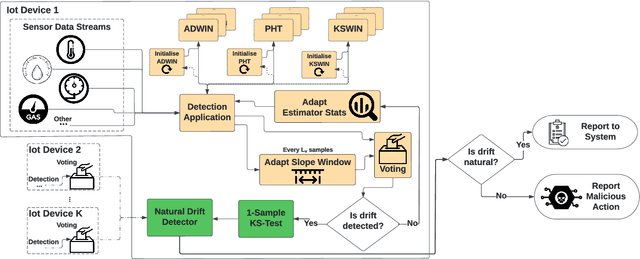
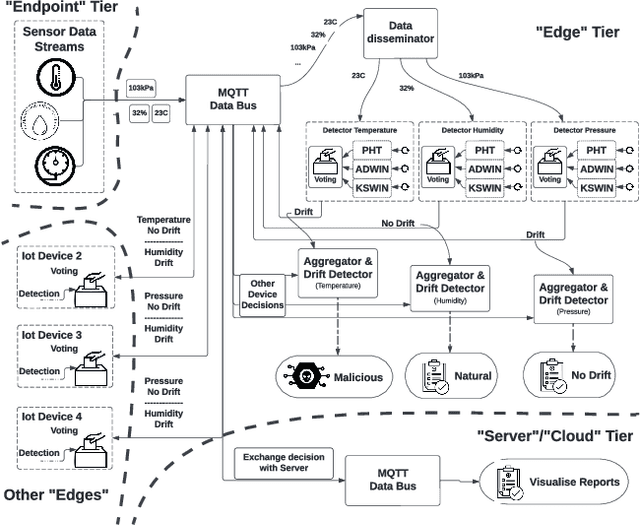
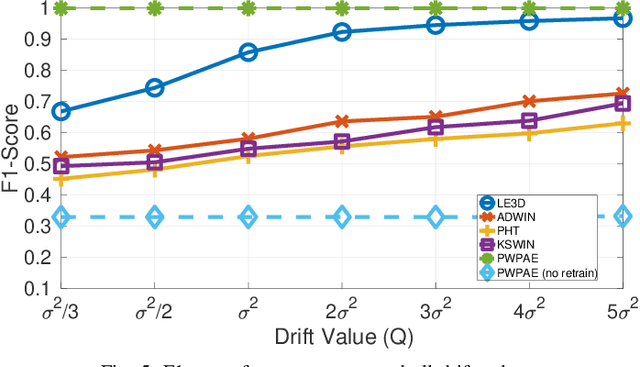
Data integrity becomes paramount as the number of Internet of Things (IoT) sensor deployments increases. Sensor data can be altered by benign causes or malicious actions. Mechanisms that detect drifts and irregularities can prevent disruptions and data bias in the state of an IoT application. This paper presents LE3D, an ensemble framework of data drift estimators capable of detecting abnormal sensor behaviours. Working collaboratively with surrounding IoT devices, the type of drift (natural/abnormal) can also be identified and reported to the end-user. The proposed framework is a lightweight and unsupervised implementation able to run on resource-constrained IoT devices. Our framework is also generalisable, adapting to new sensor streams and environments with minimal online reconfiguration. We compare our method against state-of-the-art ensemble data drift detection frameworks, evaluating both the real-world detection accuracy as well as the resource utilisation of the implementation. Experimenting with real-world data and emulated drifts, we show the effectiveness of our method, which achieves up to 97% of detection accuracy while requiring minimal resources to run.
Multi-Robot Localization and Target Tracking with Connectivity Maintenance and Collision Avoidance
Oct 10, 2022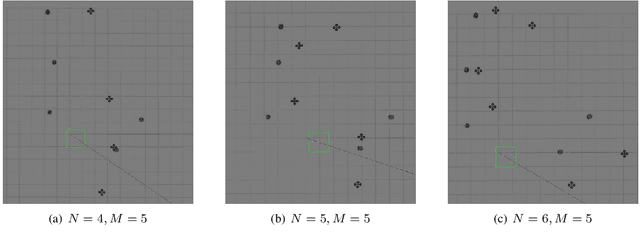
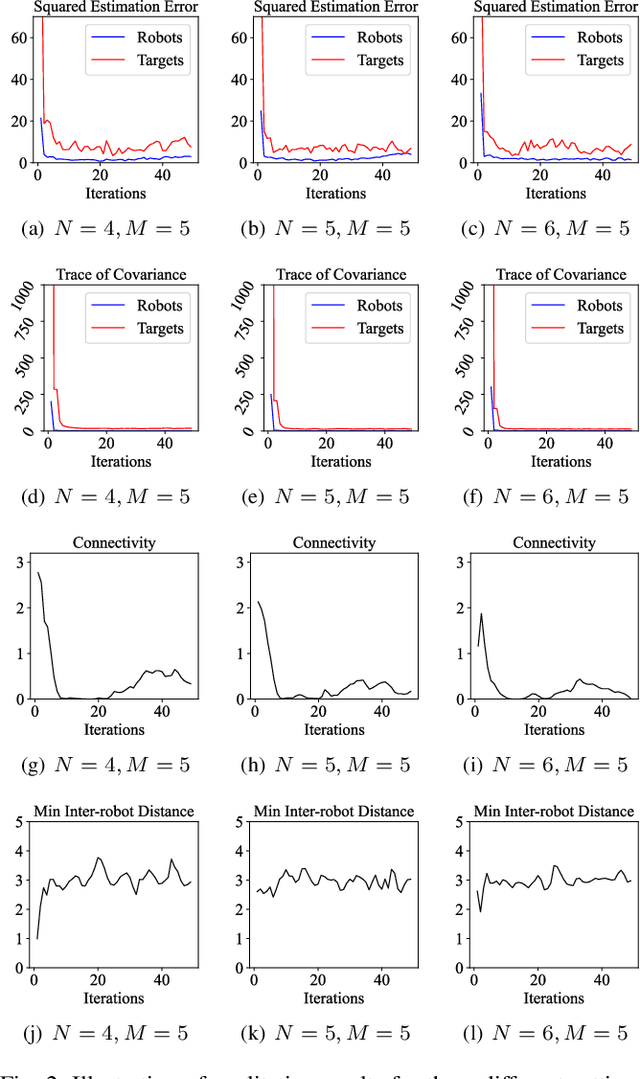
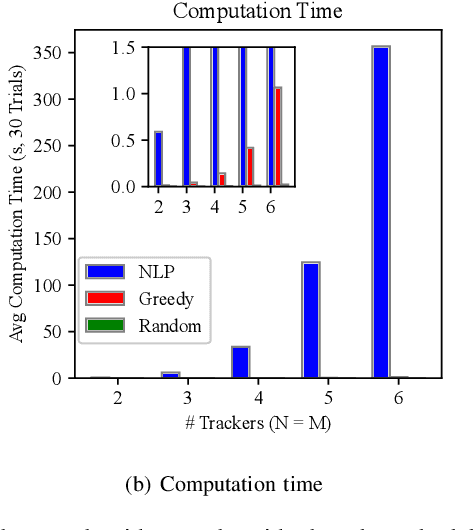
We study the problem that requires a team of robots to perform joint localization and target tracking task while ensuring team connectivity and collision avoidance. The problem can be formalized as a nonlinear, non-convex optimization program, which is typically hard to solve. To this end, we design a two-staged approach that utilizes a greedy algorithm to optimize the joint localization and target tracking performance and applies control barrier functions to ensure safety constraints, i.e., maintaining connectivity of the robot team and preventing inter-robot collisions. Simulated Gazebo experiments verify the effectiveness of the proposed approach. We further compare our greedy algorithm to a non-linear optimization solver and a random algorithm, in terms of the joint localization and tracking quality as well as the computation time. The results demonstrate that our greedy algorithm achieves high task quality and runs efficiently.
Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 28, 2022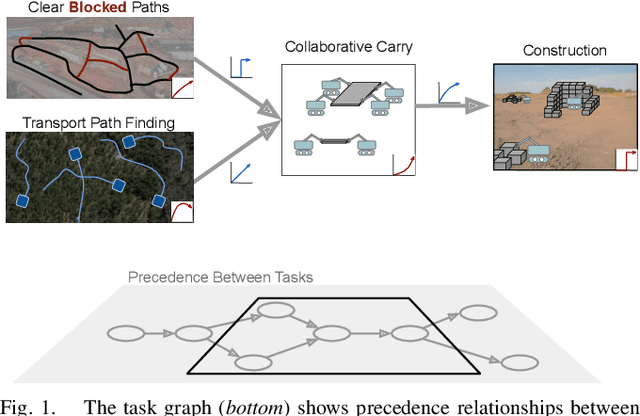

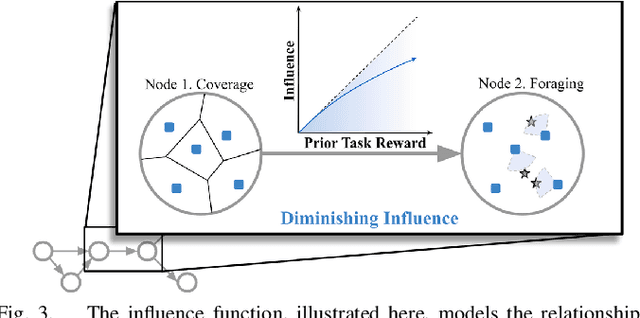
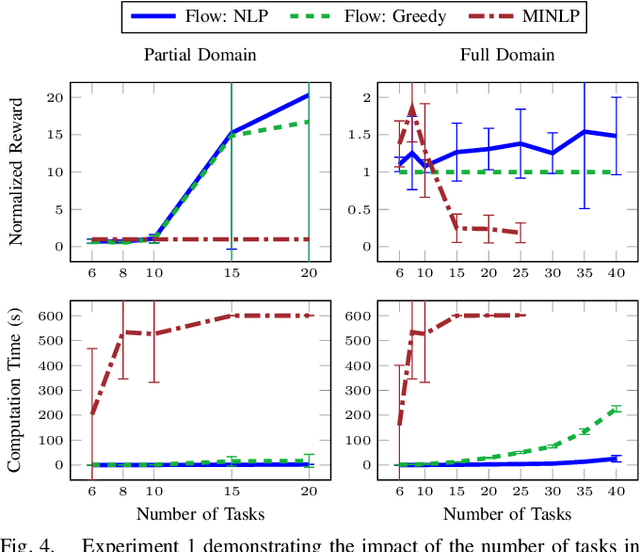
We propose a new formulation for the multi-robot task planning and allocation problem that incorporates (a) precedence relationships between tasks; (b) coordination for tasks allowing multiple robots to achieve increased efficiency; and (c) cooperation through the formation of robot coalitions for tasks that cannot be performed by individual robots alone. In our formulation, the tasks and the relationships between the tasks are specified by a task graph. We define a set of reward functions over the task graph's nodes and edges. These functions model the effect of robot coalition size on the task performance, and incorporate the influence of one task's performance on a dependent task. Solving this problem optimally is NP-hard. However, using the task graph formulation allows us to leverage min-cost network flow approaches to obtain approximate solutions efficiently. Additionally, we explore a mixed integer programming approach, which gives optimal solutions for small instances of the problem but is computationally expensive. We also develop a greedy heuristic algorithm as a baseline. Our modeling and solution approaches result in task plans that leverage task precedence relationships and robot coordination and cooperation to achieve high mission performance, even in large missions with many agents.
Vision-based Perimeter Defense via Multiview Pose Estimation
Sep 25, 2022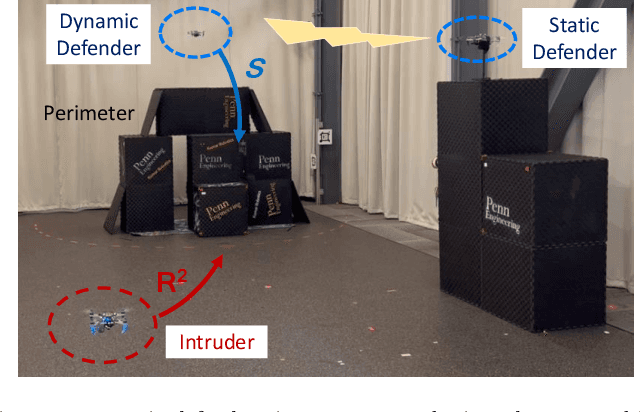
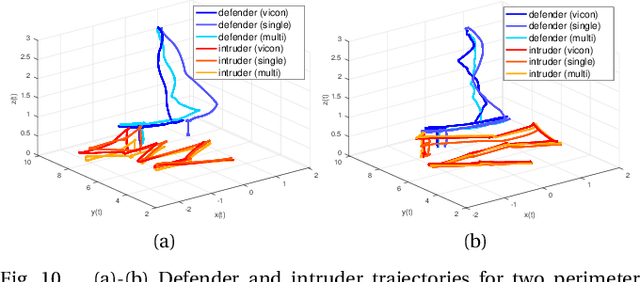
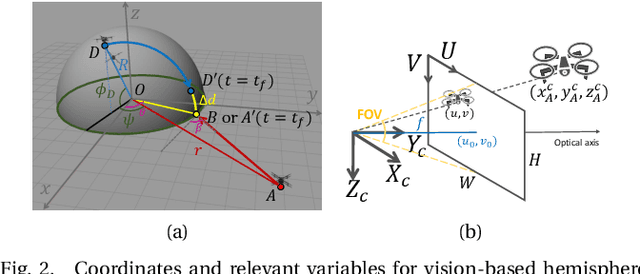
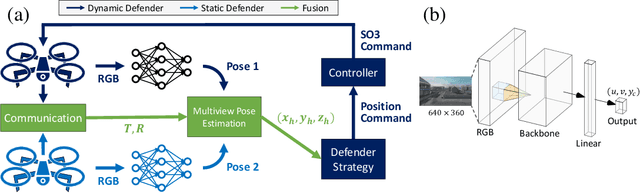
Previous studies in the perimeter defense game have largely focused on the fully observable setting where the true player states are known to all players. However, this is unrealistic for practical implementation since defenders may have to perceive the intruders and estimate their states. In this work, we study the perimeter defense game in a photo-realistic simulator and the real world, requiring defenders to estimate intruder states from vision. We train a deep machine learning-based system for intruder pose detection with domain randomization that aggregates multiple views to reduce state estimation errors and adapt the defensive strategy to account for this. We newly introduce performance metrics to evaluate the vision-based perimeter defense. Through extensive experiments, we show that our approach improves state estimation, and eventually, perimeter defense performance in both 1-defender-vs-1-intruder games, and 2-defenders-vs-1-intruder games.
Active Metric-Semantic Mapping by Multiple Aerial Robots
Sep 24, 2022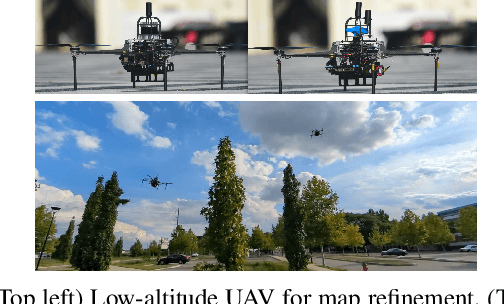
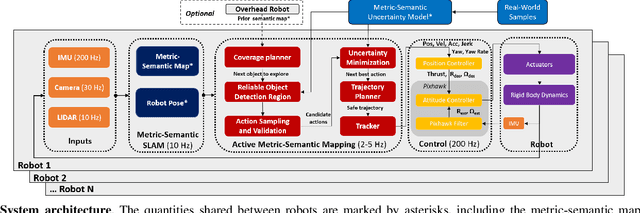
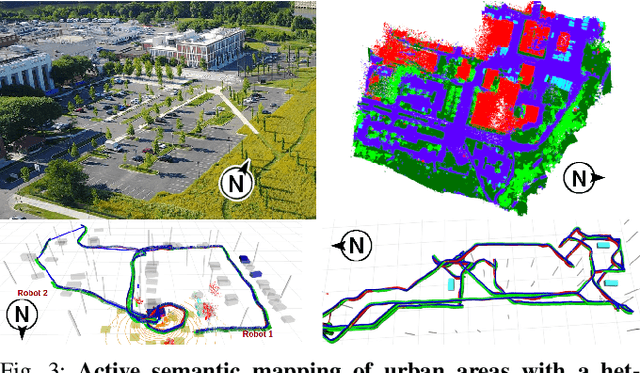
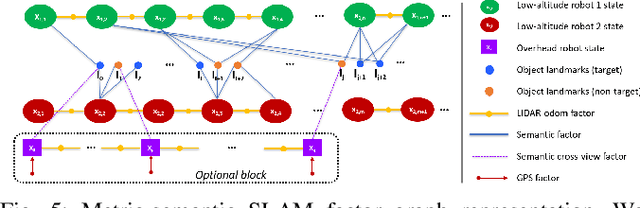
Traditional approaches for active mapping focus on building geometric maps. For most real-world applications, however, actionable information is related to semantically meaningful objects in the environment. We propose an approach to the active metric-semantic mapping problem that enables multiple heterogeneous robots to collaboratively build a map of the environment. The robots actively explore to minimize the uncertainties in both semantic (object classification) and geometric (object modeling) information. We represent the environment using informative but sparse object models, each consisting of a basic shape and a semantic class label, and characterize uncertainties empirically using a large amount of real-world data. Given a prior map, we use this model to select actions for each robot to minimize uncertainties. The performance of our algorithm is demonstrated through multi-robot experiments in diverse real-world environments. The proposed framework is applicable to a wide range of real-world problems, such as precision agriculture, infrastructure inspection, and asset mapping in factories. A demo video can be found at https://youtu.be/S86SgXi54oU.
The Role of Symmetry in Constructing Geometric Flat Outputs for Free-Flying Robotic Systems
Sep 23, 2022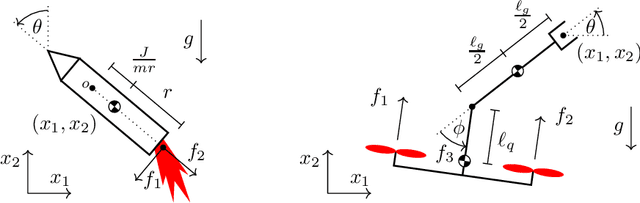
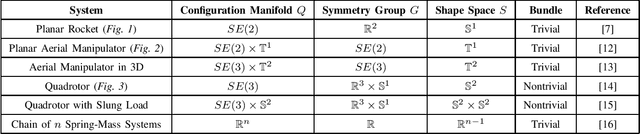
Mechanical systems naturally evolve on principal bundles describing their inherent symmetries. The ensuing factorization of the configuration manifold into a symmetry group and an internal shape space has provided deep insights into the locomotion of many robotic and biological systems. On the other hand, the property of differential flatness has enabled efficient, effective planning and control algorithms for various robotic systems. Yet, a practical means of finding a flat output for an arbitrary robotic system remains an open question. In this work, we demonstrate surprising new connections between these two domains, for the first time employing symmetry directly to construct a flat output. We provide sufficient conditions for the existence of a trivialization of the bundle in which the group variables themselves are a flat output. We call this a geometric flat output, since it is equivariant (i.e. maintains the symmetry) and is often global or almost-global, properties not typically enjoyed by other flat outputs. In such a trivialization, the motion planning problem is easily solved, since a given trajectory for the group variables will fully determine the trajectory for the shape variables that exactly achieves this motion. We provide a partial catalog of robotic systems with geometric flat outputs and worked examples for the planar rocket, planar aerial manipulator, and quadrotor.
Multi-Agent Exploration of an Unknown Sparse Landmark Complex via Deep Reinforcement Learning
Sep 23, 2022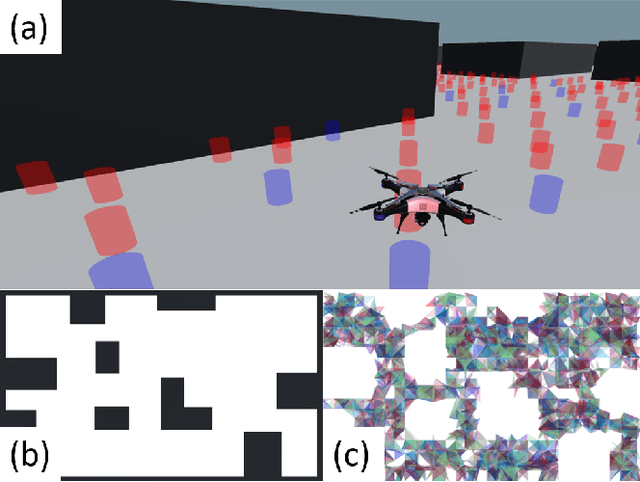
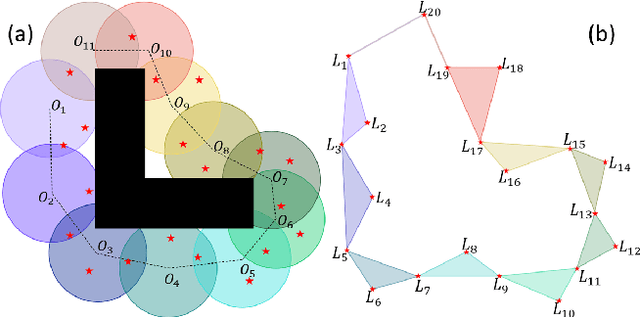
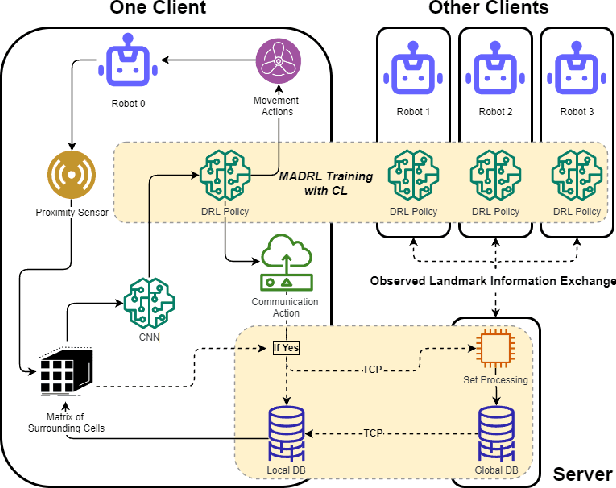
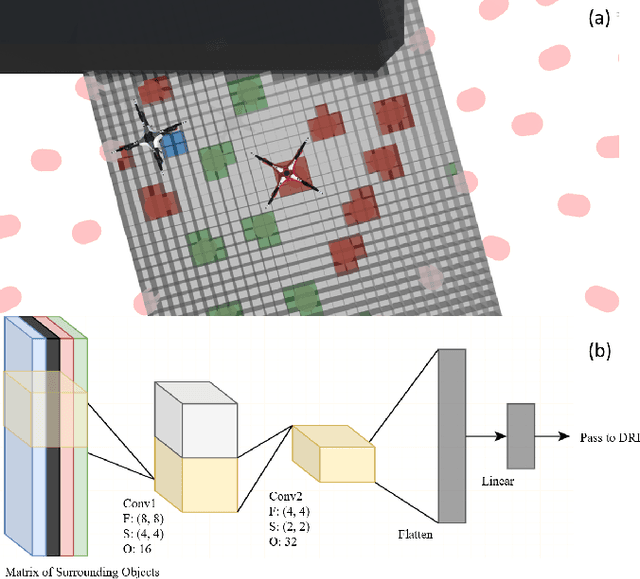
In recent years Landmark Complexes have been successfully employed for localization-free and metric-free autonomous exploration using a group of sensing-limited and communication-limited robots in a GPS-denied environment. To ensure rapid and complete exploration, existing works make assumptions on the density and distribution of landmarks in the environment. These assumptions may be overly restrictive, especially in hazardous environments where landmarks may be destroyed or completely missing. In this paper, we first propose a deep reinforcement learning framework for multi-agent cooperative exploration in environments with sparse landmarks while reducing client-server communication. By leveraging recent development on partial observability and credit assignment, our framework can train the exploration policy efficiently for multi-robot systems. The policy receives individual rewards from actions based on a proximity sensor with limited range and resolution, which is combined with group rewards to encourage collaborative exploration and construction of the Landmark Complex through observation of 0-, 1- and 2-dimensional simplices. In addition, we employ a three-stage curriculum learning strategy to mitigate the reward sparsity by gradually adding random obstacles and destroying random landmarks. Experiments in simulation demonstrate that our method outperforms the state-of-the-art landmark complex exploration method in efficiency among different environments with sparse landmarks.
SEER: Safe Efficient Exploration for Aerial Robots using Learning to Predict Information Gain
Sep 22, 2022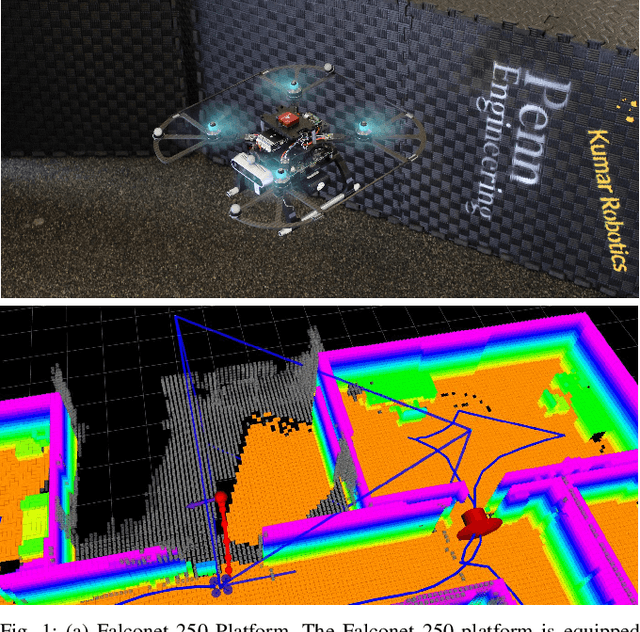
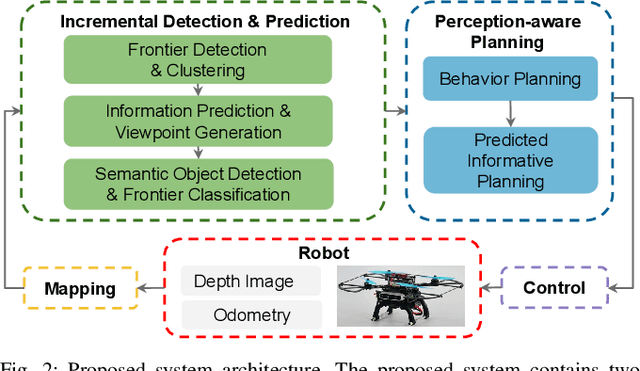
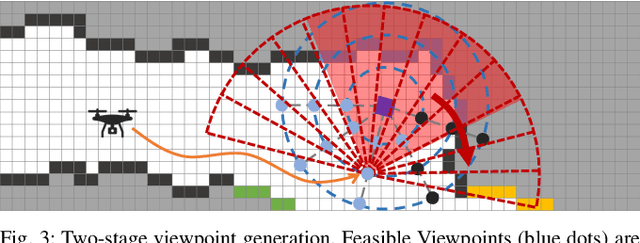
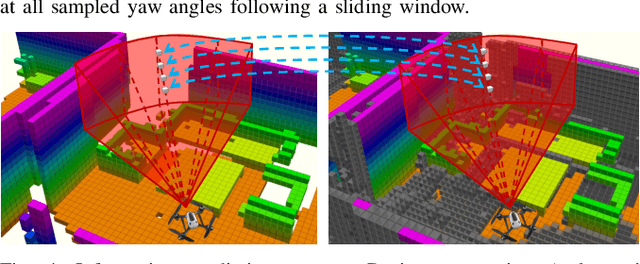
We address the problem of efficient 3-D exploration in indoor environments for micro aerial vehicles with limited sensing capabilities and payload/power constraints. We develop an indoor exploration framework that uses learning to predict the occupancy of unseen areas, extracts semantic features, samples viewpoints to predict information gains for different exploration goals, and plans informative trajectories to enable safe and smart exploration. Extensive experimentation in simulated and real-world environments shows the proposed approach outperforms the state-of-the-art exploration framework by 24% in terms of the total path length in a structured indoor environment and with a higher success rate during exploration.
Resilient Consensus via Voronoi Communication Graphs
Sep 20, 2022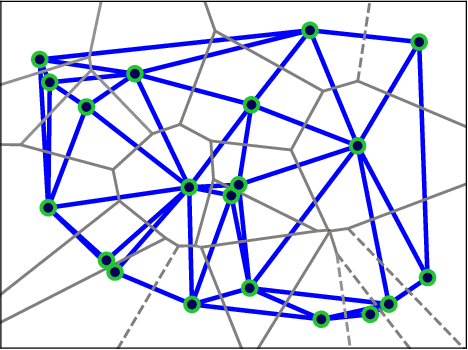
Consensus algorithms form the foundation for many distributed algorithms by enabling multiple robots to converge to consistent estimates of global variables using only local communication. However, standard consensus protocols can be easily led astray by non-cooperative team members. As such, the study of resilient forms of consensus is necessary for designing resilient distributed algorithms. W-MSR consensus is one such resilient consensus algorithm that allows for resilient consensus with only local knowledge of the communication graph and no a priori model for the data being shared. However, the verification that a given communication graph meets the strict graph connectivity requirement makes W-MSR difficult to use in practice. In this paper, we show that a commonly used communication graph structure in robotics literature, the communication graph built based on the Voronoi tessellation, automatically results in a sufficiently connected graph to reject a single non-cooperative team member. Further, we show how this graph can be enhanced to reject two non-cooperative team members and provide a roadmap for modifications for further resilience. This contribution will allow for the easy application of resilient consensus to algorithms that already rely on Voronoi-based communication such as distributed coverage and exploration algorithms.