 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTanmay Randhavane
Pedestrian Dominance Modeling for Socially-Aware Robot Navigation
Feb 13, 2019
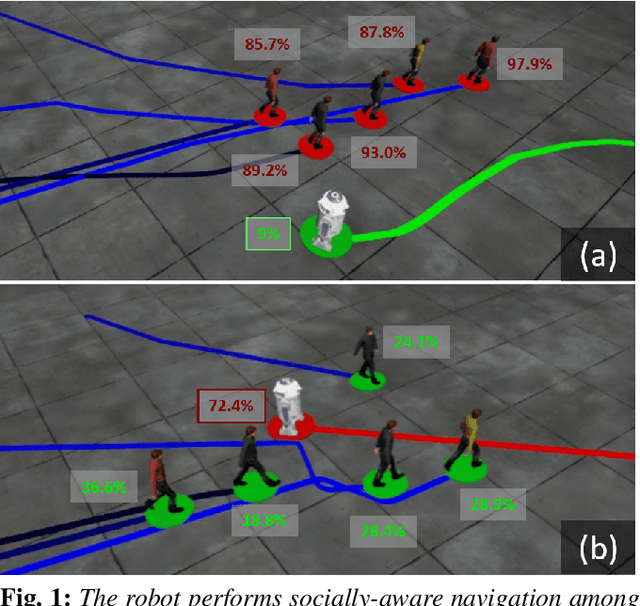
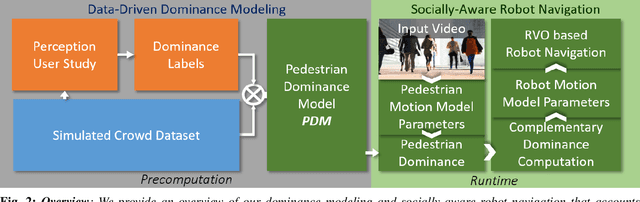
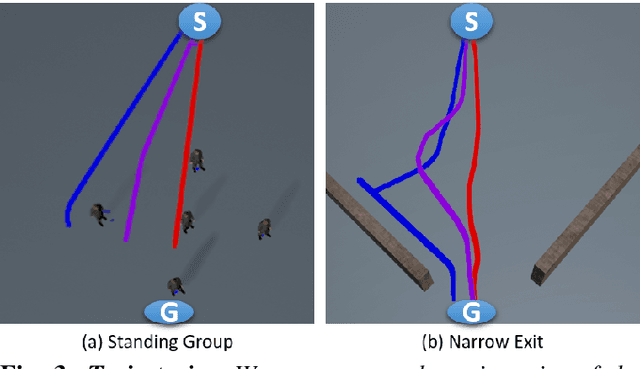
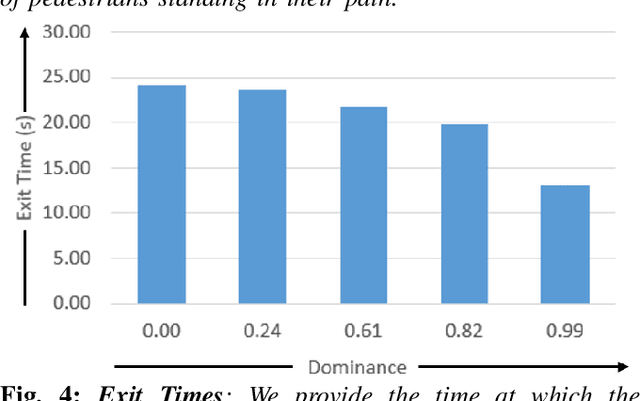
We present a Pedestrian Dominance Model (PDM) to identify the dominance characteristics of pedestrians for robot navigation. Through a perception study on a simulated dataset of pedestrians, PDM models the perceived dominance levels of pedestrians with varying motion behaviors corresponding to trajectory, speed, and personal space. At runtime, we use PDM to identify the dominance levels of pedestrians to facilitate socially-aware navigation for the robots. PDM can predict dominance levels from trajectories with ~85% accuracy. Prior studies in psychology literature indicate that when interacting with humans, people are more comfortable around people that exhibit complementary movement behaviors. Our algorithm leverages this by enabling the robots to exhibit complementing responses to pedestrian dominance. We also present an application of PDM for generating dominance-based collision-avoidance behaviors in the navigation of autonomous vehicles among pedestrians. We demonstrate the benefits of our algorithm for robots navigating among tens of pedestrians in simulated environments.
The Socially Invisible Robot: Navigation in the Social World using Robot Entitativity
Jul 18, 2018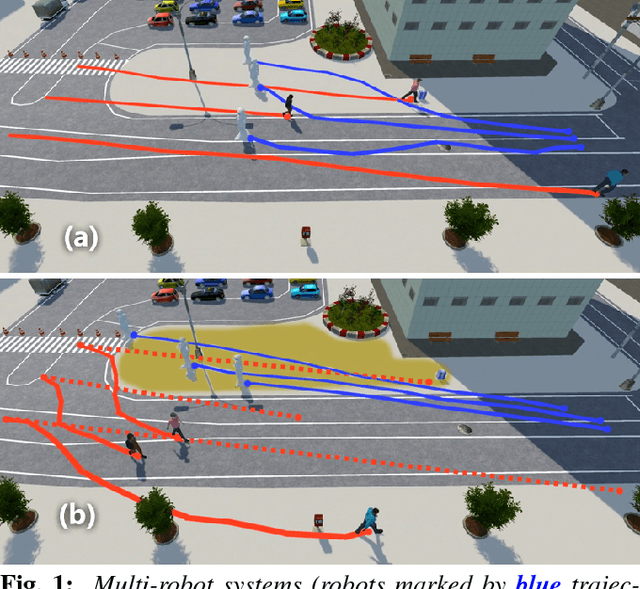
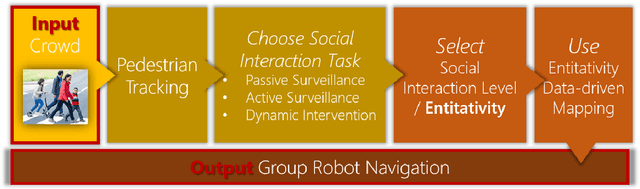
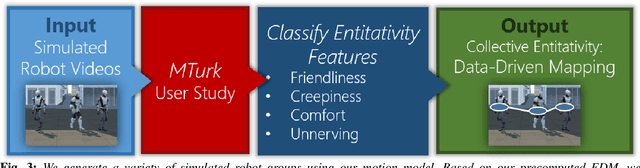
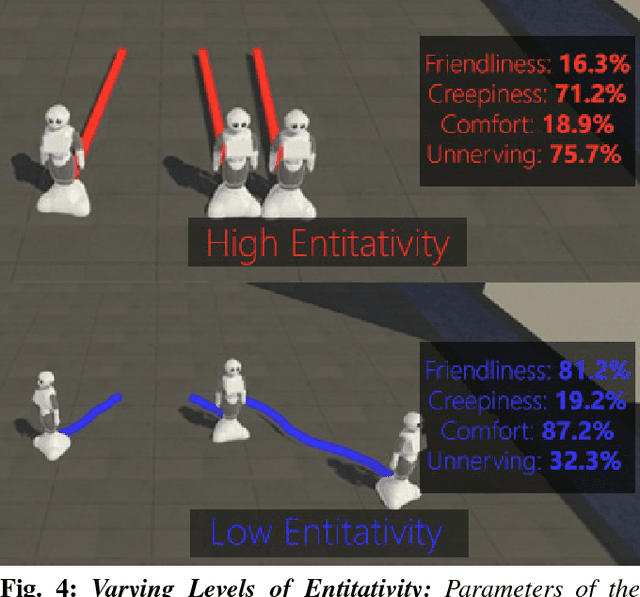
We present a real-time, data-driven algorithm to enhance the social-invisibility of robots within crowds. Our approach is based on prior psychological research, which reveals that people notice and--importantly--react negatively to groups of social actors when they have high entitativity, moving in a tight group with similar appearances and trajectories. In order to evaluate that behavior, we performed a user study to develop navigational algorithms that minimize entitativity. This study establishes a mapping between emotional reactions and multi-robot trajectories and appearances and further generalizes the finding across various environmental conditions. We demonstrate the applicability of our entitativity modeling for trajectory computation for active surveillance and dynamic intervention in simulated robot-human interaction scenarios. Our approach empirically shows that various levels of entitative robots can be used to both avoid and influence pedestrians while not eliciting strong emotional reactions, giving multi-robot systems socially-invisibility.
SocioSense: Robot Navigation Amongst Pedestrians with Social and Psychological Constraints
Jun 04, 2017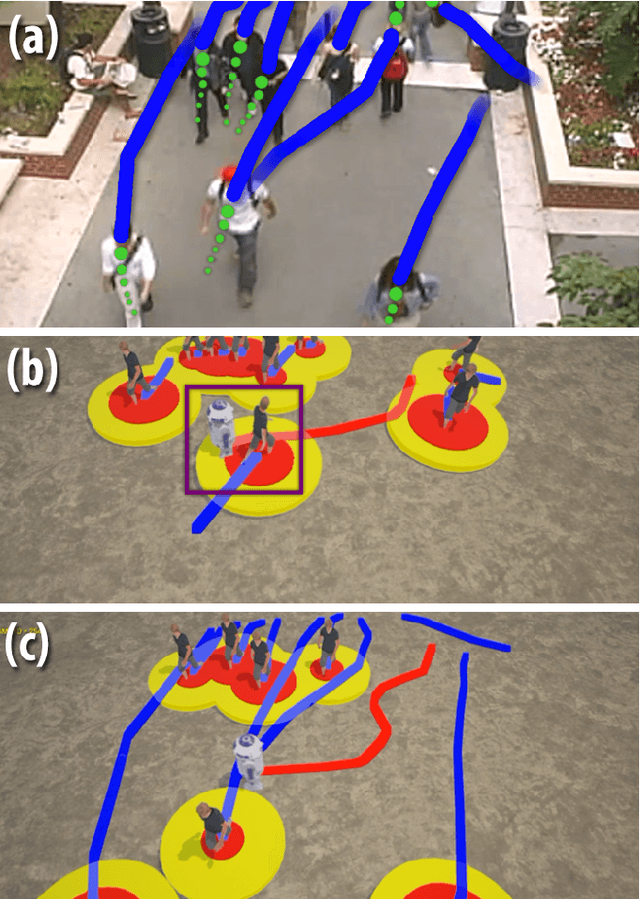
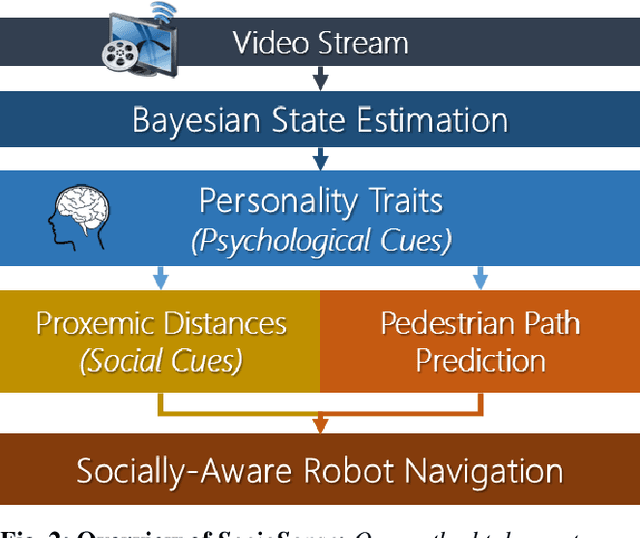
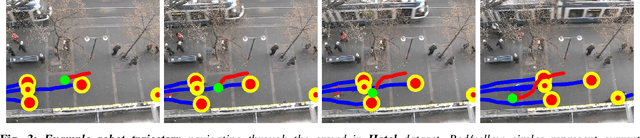
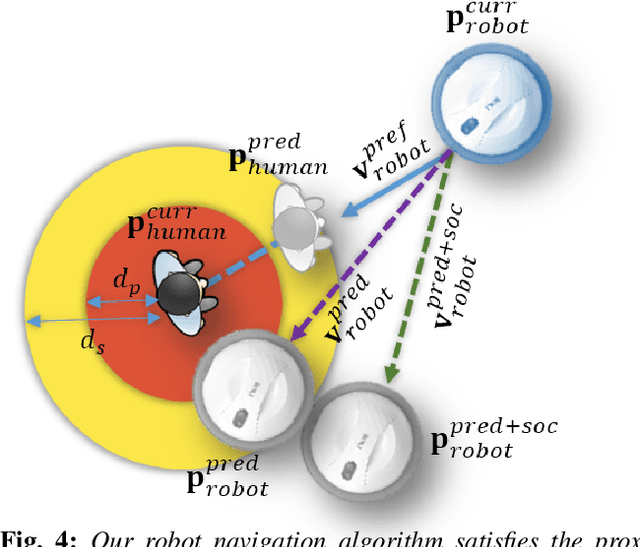
We present a real-time algorithm, SocioSense, for socially-aware navigation of a robot amongst pedestrians. Our approach computes time-varying behaviors of each pedestrian using Bayesian learning and Personality Trait theory. These psychological characteristics are used for long-term path prediction and generating proximic characteristics for each pedestrian. We combine these psychological constraints with social constraints to perform human-aware robot navigation in low- to medium-density crowds. The estimation of time-varying behaviors and pedestrian personalities can improve the performance of long-term path prediction by 21%, as compared to prior interactive path prediction algorithms. We also demonstrate the benefits of our socially-aware navigation in simulated environments with tens of pedestrians.