 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEthics of Artificial Intelligence Demarcations
May 16, 2019
In this paper we present a set of key demarcations, particularly important when discussing ethical and societal issues of current AI research and applications. Properly distinguishing issues and concerns related to Artificial General Intelligence and weak AI, between symbolic and connectionist AI, AI methods, data and applications are prerequisites for an informed debate. Such demarcations would not only facilitate much-needed discussions on ethics on current AI technologies and research. In addition sufficiently establishing such demarcations would also enhance knowledge-sharing and support rigor in interdisciplinary research between technical and social sciences.
Evolved Art with Transparent, Overlapping, and Geometric Shapes
May 16, 2019


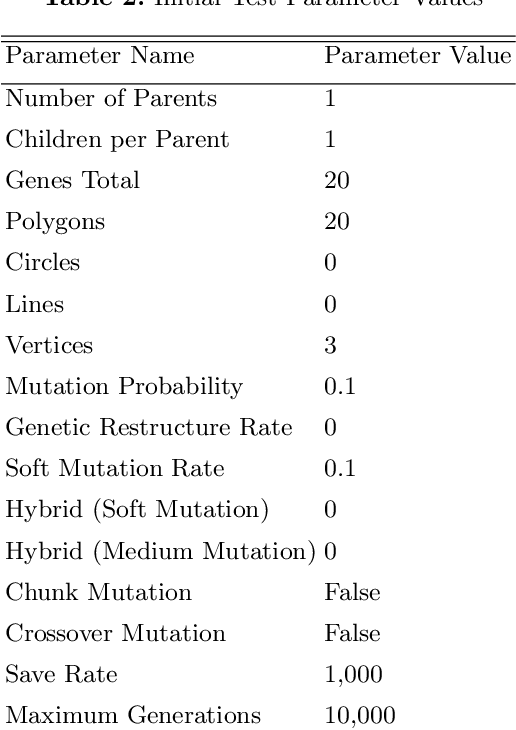
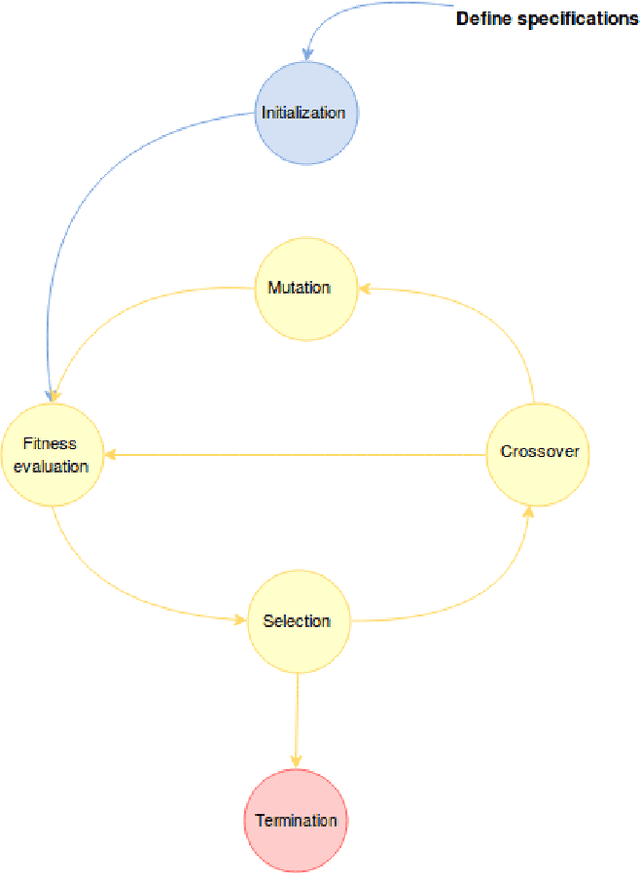
In this work, an evolutionary art project is presented where images are approximated by transparent, overlapping and geometric shapes of different types, e.g., polygons, circles, lines. Genotypes representing features and order of the geometric shapes are evolved with a fitness function that has the corresponding pixels of an input image as a target goal. A genotype-to-phenotype mapping is therefore applied to render images, as the chosen genetic representation is indirect, i.e., genotypes do not include pixels but a combination of shapes with their properties. Different combinations of shapes, quantity of shapes, mutation types and populations are tested. The goal of the work herein is twofold: (1) to approximate images as precisely as possible with evolved indirect encodings, (2) to produce visually appealing results and novel artistic styles.
Towards a framework for the evolution of artificial general intelligence
Mar 27, 2019

In this work, a novel framework for the emergence of general intelligence is proposed, where agents evolve through environmental rewards and learn throughout their lifetime without supervision, i.e., self-supervised learning through embodiment. The chosen control mechanism for agents is a biologically plausible neuron model based on spiking neural networks. Network topologies become more complex through evolution, i.e., the topology is not fixed, while the synaptic weights of the networks cannot be inherited, i.e., newborn brains are not trained and have no innate knowledge of the environment. What is subject to the evolutionary process is the network topology, the type of neurons, and the type of learning. This process ensures that controllers that are passed through the generations have the intrinsic ability to learn and adapt during their lifetime in mutable environments. We envision that the described approach may lead to the emergence of the simplest form of artificial general intelligence.
Autonomous Configuration of Network Parameters in Operating Systems using Evolutionary Algorithms
Aug 31, 2018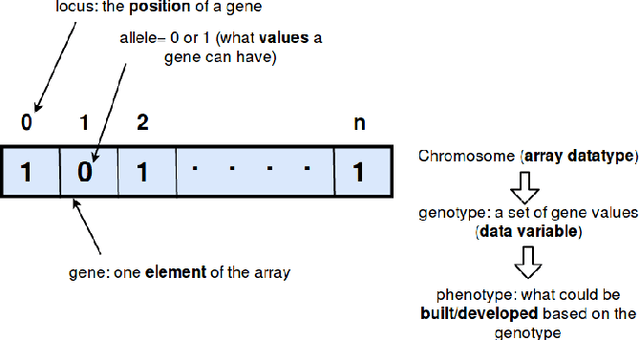
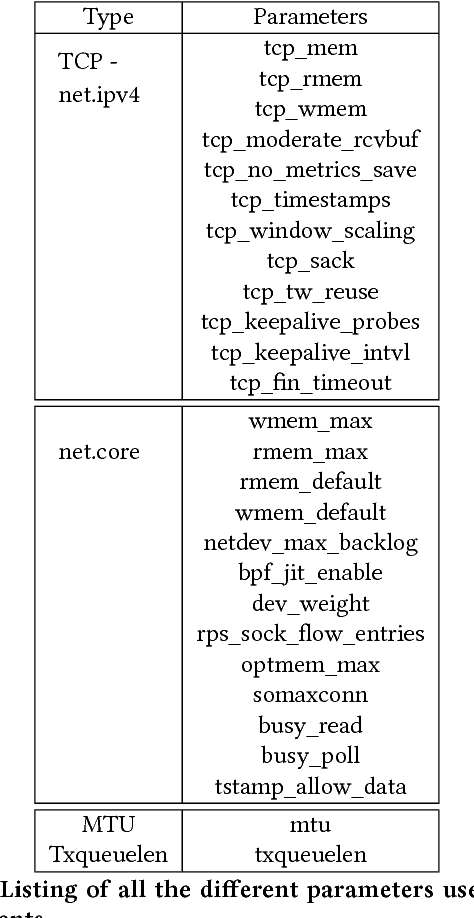
By default, the Linux network stack is not configured for highspeed large file transfer. The reason behind this is to save memory resources. It is possible to tune the Linux network stack by increasing the network buffers size for high-speed networks that connect server systems in order to handle more network packets. However, there are also several other TCP/IP parameters that can be tuned in an Operating System (OS). In this paper, we leverage Genetic Algorithms (GAs) to devise a system which learns from the history of the network traffic and uses this knowledge to optimize the current performance by adjusting the parameters. This can be done for a standard Linux kernel using sysctl or /proc. For a Virtual Machine (VM), virtually any type of OS can be installed and an image can swiftly be compiled and deployed. By being a sandboxed environment, risky configurations can be tested without the danger of harming the system. Different scenarios for network parameter configurations are thoroughly tested, and an increase of up to 65% throughput speed is achieved compared to the default Linux configuration.
Achieving Connectivity Between Wide Areas Through Self-Organising Robot Swarm Using Embodied Evolution
Jul 12, 2018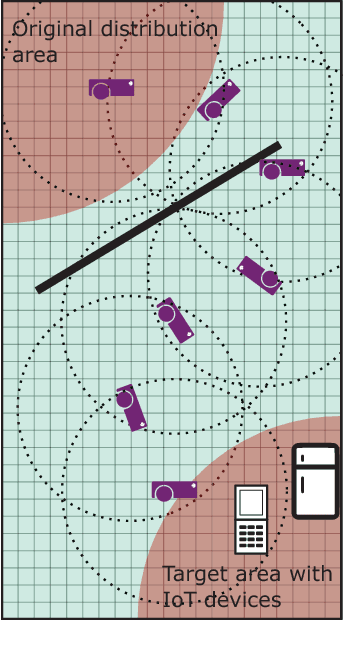
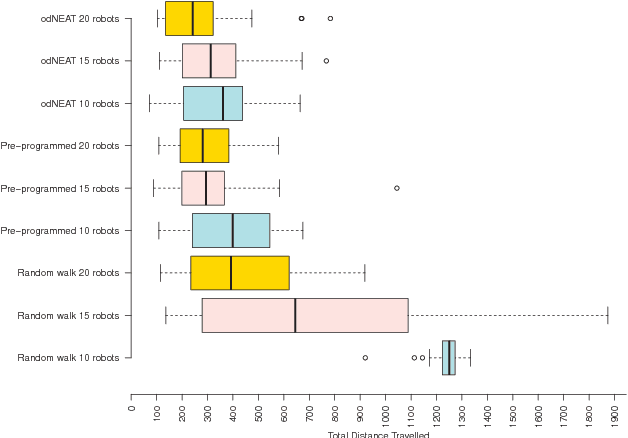
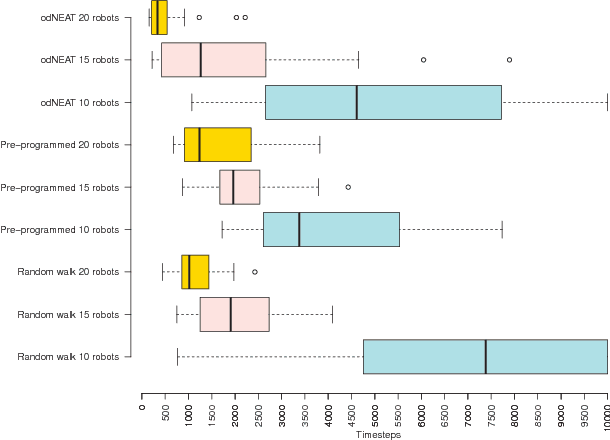
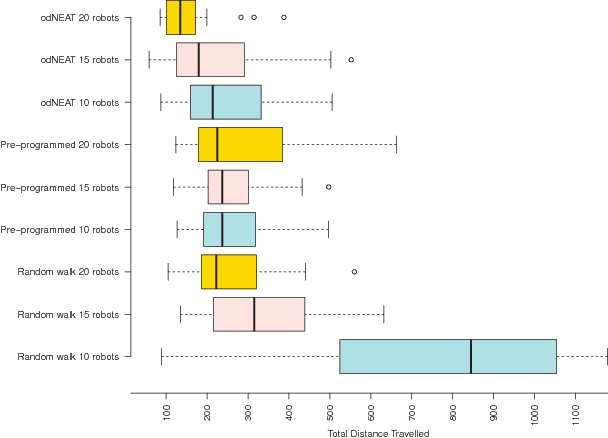
Abruptions to the communication infrastructure happens occasionally, where manual dedicated personnel will go out to fix the interruptions, restoring communication abilities. However, sometimes this can be dangerous to the personnel carrying out the task, which can be the case in war situations, environmental disasters like earthquakes or toxic spills or in the occurrence of fire. Therefore, human casualties can be minimised if autonomous robots are deployed that can achieve the same outcome: to establish a communication link between two previously distant but connected sites. In this paper we investigate the deployment of mobile ad hoc robots which relay traffic between them. In order to get the robots to locate themselves appropriately, we take inspiration from self-organisation and emergence in artificial life, where a common overall goal may be achieved if the correct local rules on the agents in system are invoked. We integrate the aspect of connectivity between two sites into the multirobot simulation platform known as JBotEvolver. The robot swarm is composed of Thymio II robots. In addition, we compare three heuristics, of which one uses neuroevolution (evolution of neural networks) to show how self-organisation and embodied evolution can be used within the integration. Our use of embodiment in robotic controllers shows promising results and provide solid knowledge and guidelines for further investigations.
Deep Reservoir Computing Using Cellular Automata
Mar 08, 2017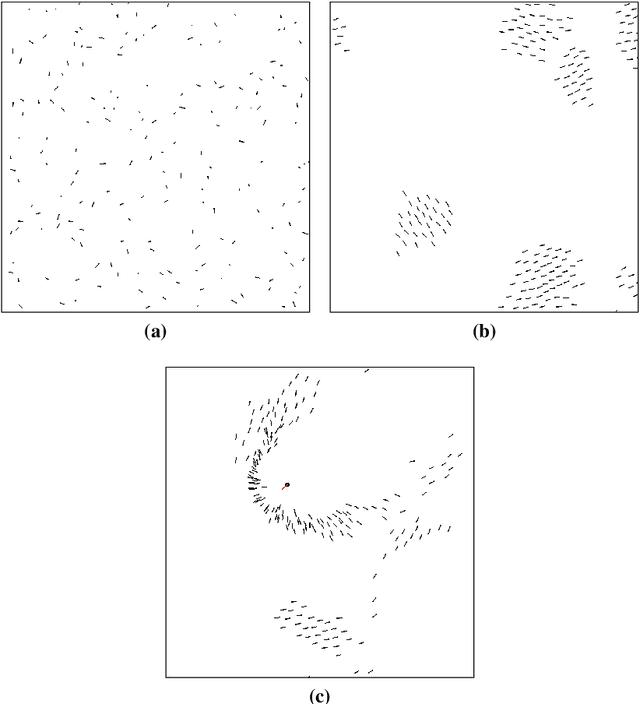

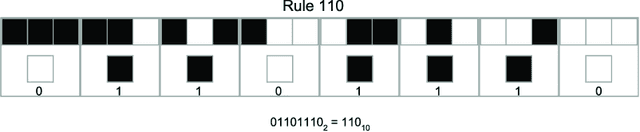
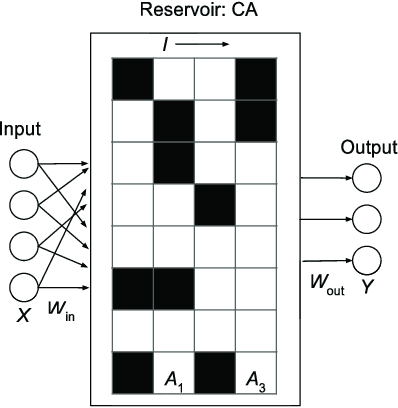
Recurrent Neural Networks (RNNs) have been a prominent concept within artificial intelligence. They are inspired by Biological Neural Networks (BNNs) and provide an intuitive and abstract representation of how BNNs work. Derived from the more generic Artificial Neural Networks (ANNs), the recurrent ones are meant to be used for temporal tasks, such as speech recognition, because they are capable of memorizing historic input. However, such networks are very time consuming to train as a result of their inherent nature. Recently, Echo State Networks and Liquid State Machines have been proposed as possible RNN alternatives, under the name of Reservoir Computing (RC). RCs are far more easy to train. In this paper, Cellular Automata are used as reservoir, and are tested on the 5-bit memory task (a well known benchmark within the RC community). The work herein provides a method of mapping binary inputs from the task onto the automata, and a recurrent architecture for handling the sequential aspects of it. Furthermore, a layered (deep) reservoir architecture is proposed. Performances are compared towards earlier work, in addition to its single-layer version. Results show that the single CA reservoir system yields similar results to state-of-the-art work. The system comprised of two layered reservoirs do show a noticeable improvement compared to a single CA reservoir. This indicates potential for further research and provides valuable insight on how to design CA reservoir systems.
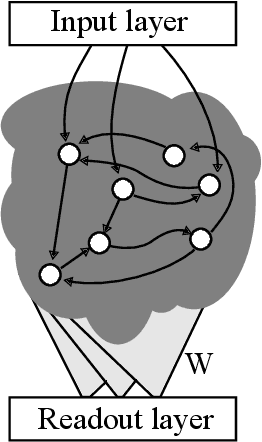
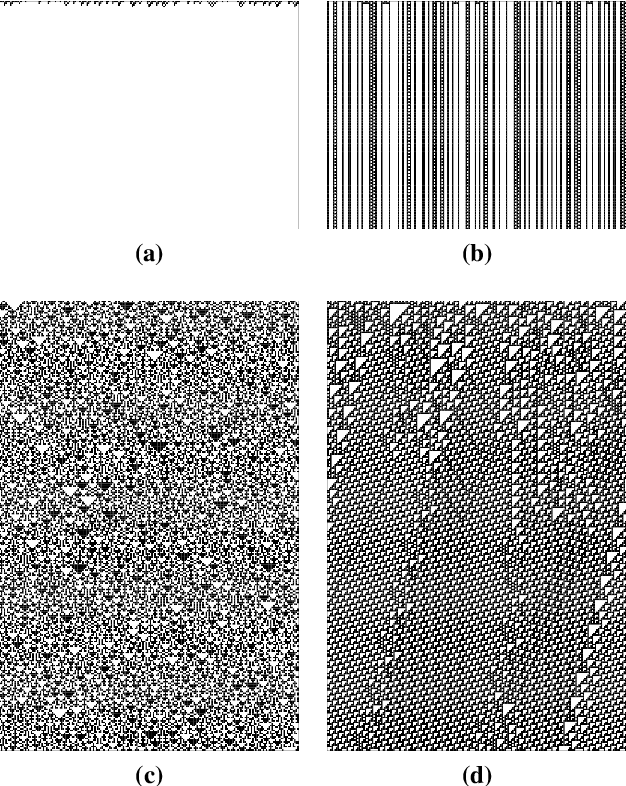
Reservoir Computing Using Non-Uniform Binary Cellular Automata
Feb 13, 2017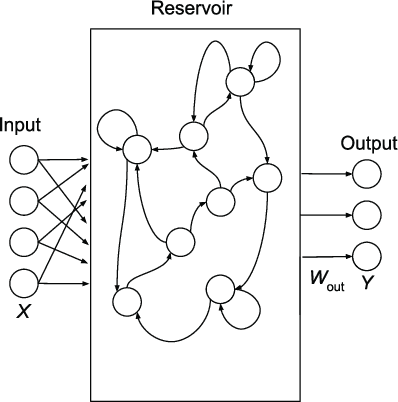

The Reservoir Computing (RC) paradigm utilizes a dynamical system, i.e., a reservoir, and a linear classifier, i.e., a read-out layer, to process data from sequential classification tasks. In this paper the usage of Cellular Automata (CA) as a reservoir is investigated. The use of CA in RC has been showing promising results. In this paper, selected state-of-the-art experiments are reproduced. It is shown that some CA-rules perform better than others, and the reservoir performance is improved by increasing the size of the CA reservoir itself. In addition, the usage of parallel loosely coupled CA-reservoirs, where each reservoir has a different CA-rule, is investigated. The experiments performed on quasi-uniform CA reservoir provide valuable insights in CA reservoir design. The results herein show that some rules do not work well together, while other combinations work remarkably well. This suggests that non-uniform CA could represent a powerful tool for novel CA reservoir implementations.