 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFARM: Functional Automatic Registration Method for 3D Human Bodies
Jul 27, 2018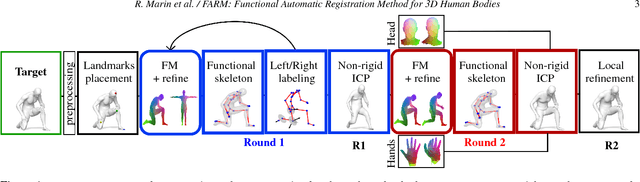
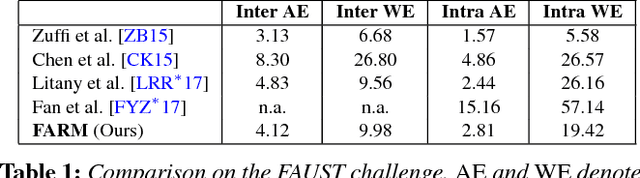
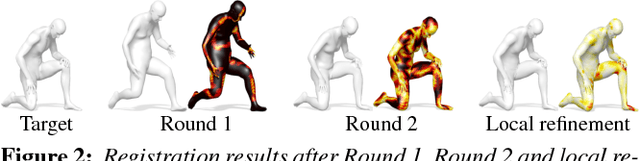
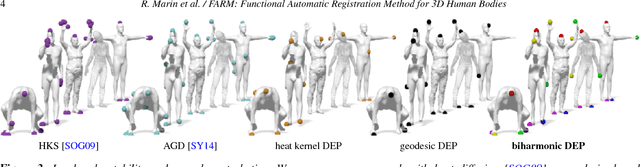
We introduce a new method for non-rigid registration of 3D human shapes. Our proposed pipeline builds upon a given parametric model of the human, and makes use of the functional map representation for encoding and inferring shape maps throughout the registration process. This combination endows our method with robustness to a large variety of nuisances observed in practical settings, including non-isometric transformations, downsampling, topological noise, and occlusions; further, the pipeline can be applied invariably across different shape representations (e.g. meshes and point clouds), and in the presence of (even dramatic) missing parts such as those arising in real-world depth sensing applications. We showcase our method on a selection of challenging tasks, demonstrating results in line with, or even surpassing, state-of-the-art methods in the respective areas.
Infinite Latent Feature Selection: A Probabilistic Latent Graph-Based Ranking Approach
Jul 24, 2017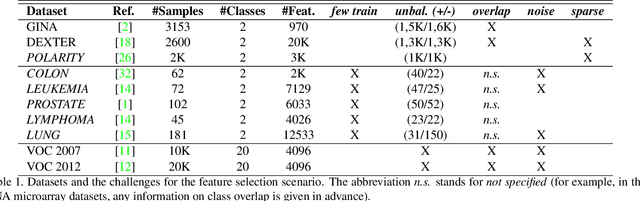
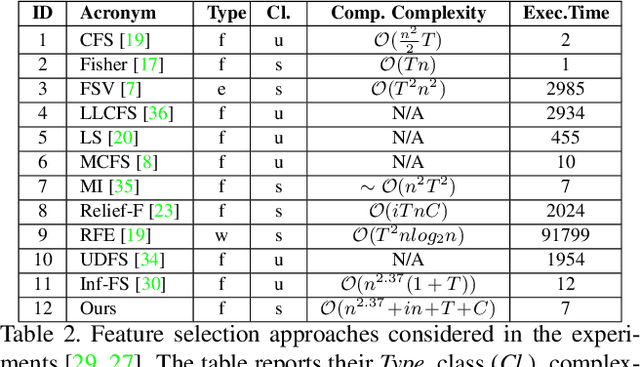
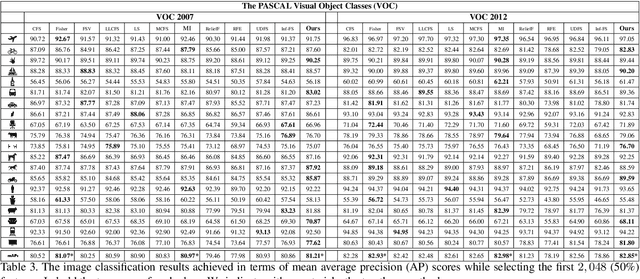
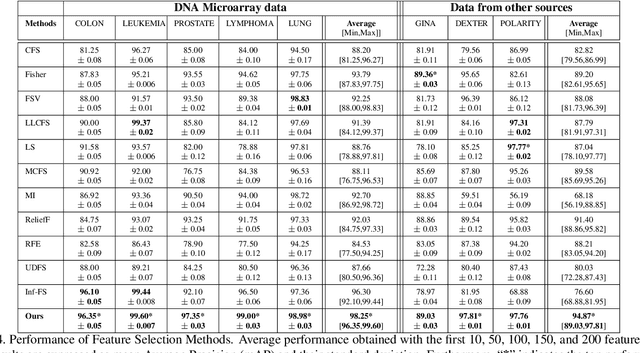
Feature selection is playing an increasingly significant role with respect to many computer vision applications spanning from object recognition to visual object tracking. However, most of the recent solutions in feature selection are not robust across different and heterogeneous set of data. In this paper, we address this issue proposing a robust probabilistic latent graph-based feature selection algorithm that performs the ranking step while considering all the possible subsets of features, as paths on a graph, bypassing the combinatorial problem analytically. An appealing characteristic of the approach is that it aims to discover an abstraction behind low-level sensory data, that is, relevancy. Relevancy is modelled as a latent variable in a PLSA-inspired generative process that allows the investigation of the importance of a feature when injected into an arbitrary set of cues. The proposed method has been tested on ten diverse benchmarks, and compared against eleven state of the art feature selection methods. Results show that the proposed approach attains the highest performance levels across many different scenarios and difficulties, thereby confirming its strong robustness while setting a new state of the art in feature selection domain.
Ranking to Learn: Feature Ranking and Selection via Eigenvector Centrality
Apr 18, 2017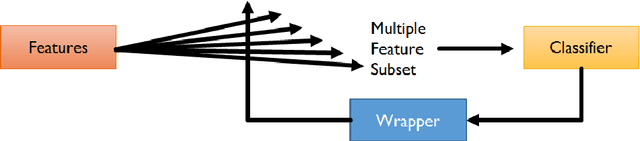
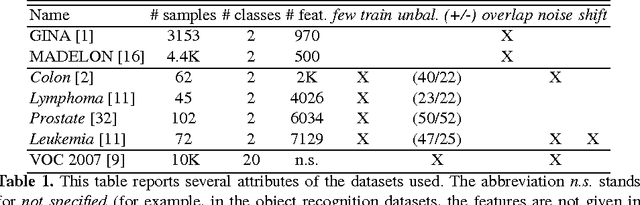
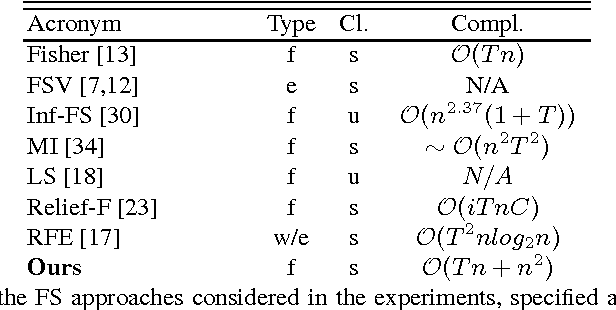
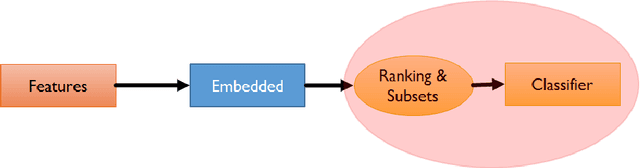
In an era where accumulating data is easy and storing it inexpensive, feature selection plays a central role in helping to reduce the high-dimensionality of huge amounts of otherwise meaningless data. In this paper, we propose a graph-based method for feature selection that ranks features by identifying the most important ones into arbitrary set of cues. Mapping the problem on an affinity graph-where features are the nodes-the solution is given by assessing the importance of nodes through some indicators of centrality, in particular, the Eigen-vector Centrality (EC). The gist of EC is to estimate the importance of a feature as a function of the importance of its neighbors. Ranking central nodes individuates candidate features, which turn out to be effective from a classification point of view, as proved by a thoroughly experimental section. Our approach has been tested on 7 diverse datasets from recent literature (e.g., biological data and object recognition, among others), and compared against filter, embedded and wrappers methods. The results are remarkable in terms of accuracy, stability and low execution time.
* Preprint version - Lecture Notes in Computer Science - Springer 2017
Object Tracking via Dynamic Feature Selection Processes
Sep 07, 2016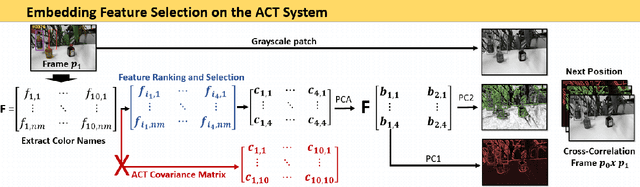
DFST proposes an optimized visual tracking algorithm based on the real-time selection of locally and temporally discriminative features. A feature selection mechanism is embedded in the Adaptive colour Names (CN) tracking system that adaptively selects the top-ranked discriminative features for tracking. DFST provides a significant gain in accuracy and precision allowing the use of a dynamic set of features that results in an increased system flexibility. DFST is based on the unsupervised method "Infinite Feature Selection" (Inf-FS), which ranks features according with their "redundancy" without using class labels. By using a fast online algorithm for learning dictionaries the size of the box is adapted during the processing. At each update, we use multiple examples around the target (at different positions and scales). DFST also improved the CN by adding micro-shift at the predicted position and bounding box adaptation.