 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShimon Whiteson
Learning with Opponent-Learning Awareness
Sep 19, 2018
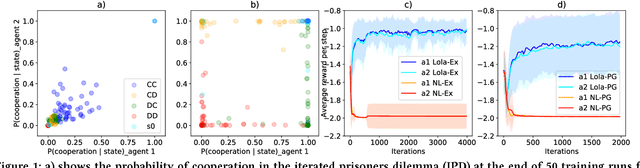
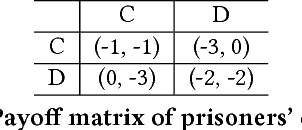
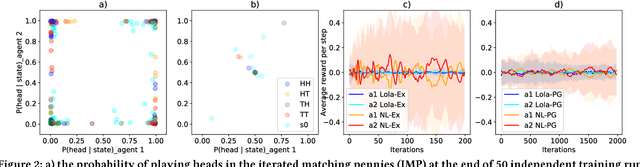
Multi-agent settings are quickly gathering importance in machine learning. This includes a plethora of recent work on deep multi-agent reinforcement learning, but also can be extended to hierarchical RL, generative adversarial networks and decentralised optimisation. In all these settings the presence of multiple learning agents renders the training problem non-stationary and often leads to unstable training or undesired final results. We present Learning with Opponent-Learning Awareness (LOLA), a method in which each agent shapes the anticipated learning of the other agents in the environment. The LOLA learning rule includes a term that accounts for the impact of one agent's policy on the anticipated parameter update of the other agents. Results show that the encounter of two LOLA agents leads to the emergence of tit-for-tat and therefore cooperation in the iterated prisoners' dilemma, while independent learning does not. In this domain, LOLA also receives higher payouts compared to a naive learner, and is robust against exploitation by higher order gradient-based methods. Applied to repeated matching pennies, LOLA agents converge to the Nash equilibrium. In a round robin tournament we show that LOLA agents successfully shape the learning of a range of multi-agent learning algorithms from literature, resulting in the highest average returns on the IPD. We also show that the LOLA update rule can be efficiently calculated using an extension of the policy gradient estimator, making the method suitable for model-free RL. The method thus scales to large parameter and input spaces and nonlinear function approximators. We apply LOLA to a grid world task with an embedded social dilemma using recurrent policies and opponent modelling. By explicitly considering the learning of the other agent, LOLA agents learn to cooperate out of self-interest. The code is at github.com/alshedivat/lola.
DiCE: The Infinitely Differentiable Monte-Carlo Estimator
Sep 19, 2018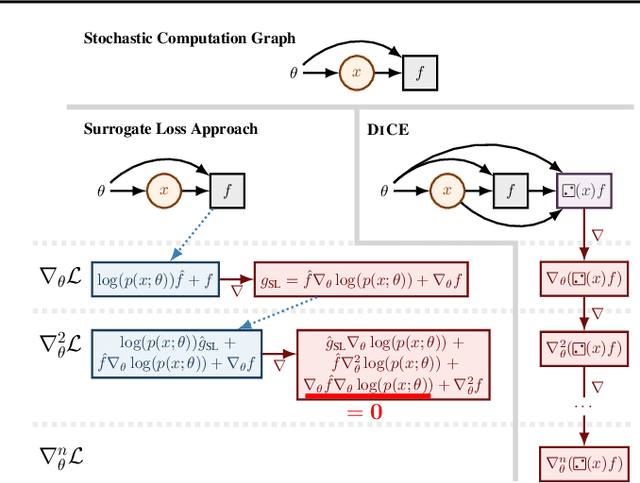
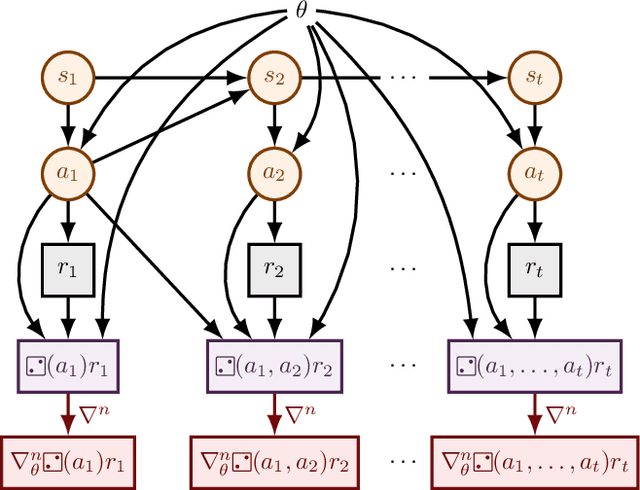
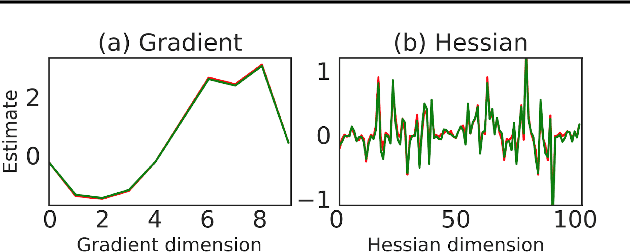
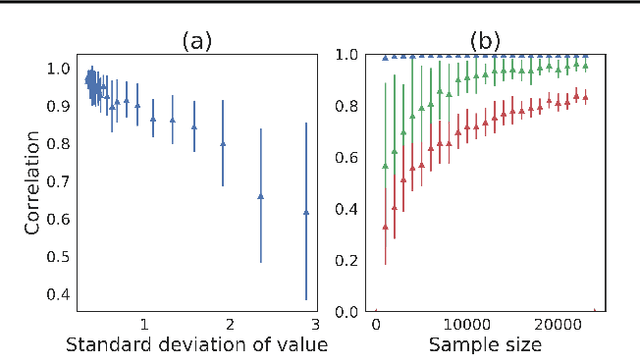
The score function estimator is widely used for estimating gradients of stochastic objectives in stochastic computation graphs (SCG), eg, in reinforcement learning and meta-learning. While deriving the first-order gradient estimators by differentiating a surrogate loss (SL) objective is computationally and conceptually simple, using the same approach for higher-order derivatives is more challenging. Firstly, analytically deriving and implementing such estimators is laborious and not compliant with automatic differentiation. Secondly, repeatedly applying SL to construct new objectives for each order derivative involves increasingly cumbersome graph manipulations. Lastly, to match the first-order gradient under differentiation, SL treats part of the cost as a fixed sample, which we show leads to missing and wrong terms for estimators of higher-order derivatives. To address all these shortcomings in a unified way, we introduce DiCE, which provides a single objective that can be differentiated repeatedly, generating correct estimators of derivatives of any order in SCGs. Unlike SL, DiCE relies on automatic differentiation for performing the requisite graph manipulations. We verify the correctness of DiCE both through a proof and numerical evaluation of the DiCE derivative estimates. We also use DiCE to propose and evaluate a novel approach for multi-agent learning. Our code is available at https://www.github.com/alshedivat/lola.
Fingerprint Policy Optimisation for Robust Reinforcement Learning
Sep 15, 2018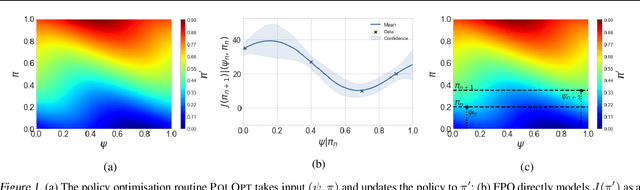
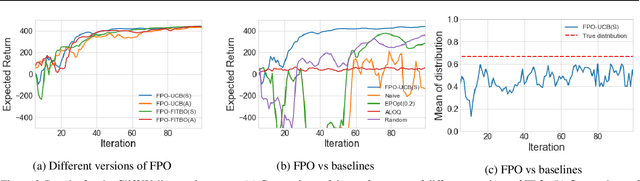
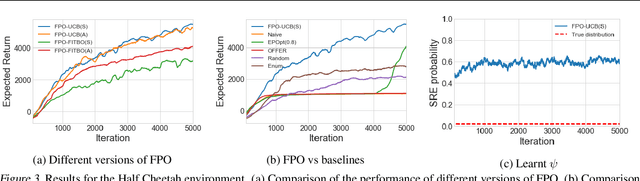
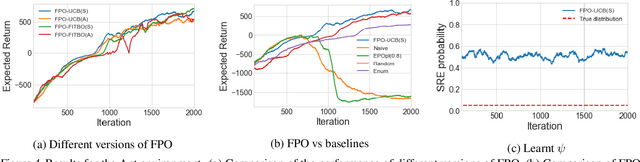
Policy gradient methods have been successfully applied to a variety of reinforcement learning tasks. However, while learning in a simulator, these methods do not utilise the opportunity to improve learning by adjusting certain environment variables: unobservable state features that are randomly determined by the environment in a physical setting, but that are controllable in a simulator. This can lead to slow learning or convergence to highly suboptimal policies if the environment variable has a large impact on the transition dynamics. In this paper, we present fingerprint policy optimisation (FPO) which finds a policy that is optimal in expectation across the distribution of environment variables. The central idea is to use Bayesian optimisation (BO) to actively select the distribution of the environment variable that maximises the improvement generated by each iteration of the policy gradient method. To make this BO practical, we contribute two easy-to-compute low-dimensional fingerprints of the current policy. We apply FPO to a number of continuous control tasks of varying difficulty and show that FPO can efficiently learn policies that are robust to significant rare events, which are unlikely to be observable under random sampling but are key to learning good policies.
TACO: Learning Task Decomposition via Temporal Alignment for Control
Aug 10, 2018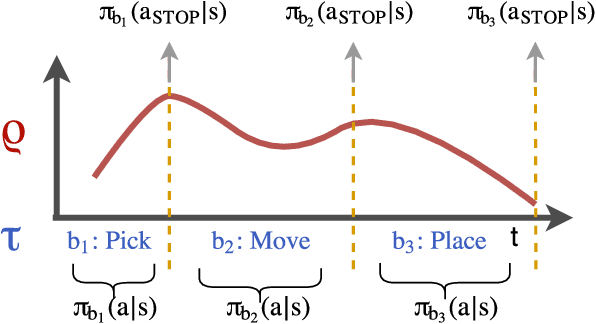
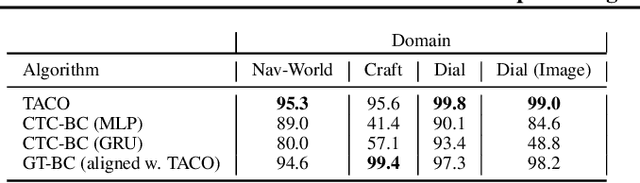
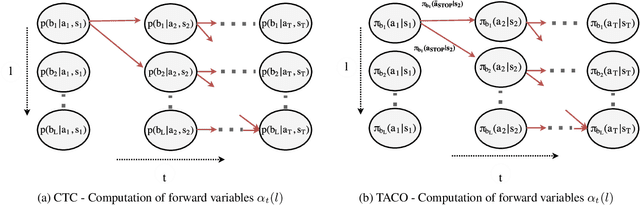
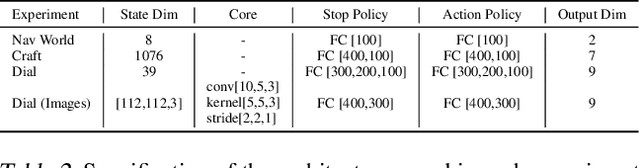
Many advanced Learning from Demonstration (LfD) methods consider the decomposition of complex, real-world tasks into simpler sub-tasks. By reusing the corresponding sub-policies within and between tasks, they provide training data for each policy from different high-level tasks and compose them to perform novel ones. Existing approaches to modular LfD focus either on learning a single high-level task or depend on domain knowledge and temporal segmentation. In contrast, we propose a weakly supervised, domain-agnostic approach based on task sketches, which include only the sequence of sub-tasks performed in each demonstration. Our approach simultaneously aligns the sketches with the observed demonstrations and learns the required sub-policies. This improves generalisation in comparison to separate optimisation procedures. We evaluate the approach on multiple domains, including a simulated 3D robot arm control task using purely image-based observations. The results show that our approach performs commensurately with fully supervised approaches, while requiring significantly less annotation effort.
Deep Variational Reinforcement Learning for POMDPs
Jun 06, 2018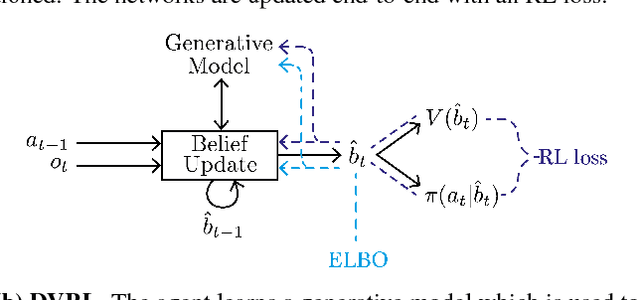
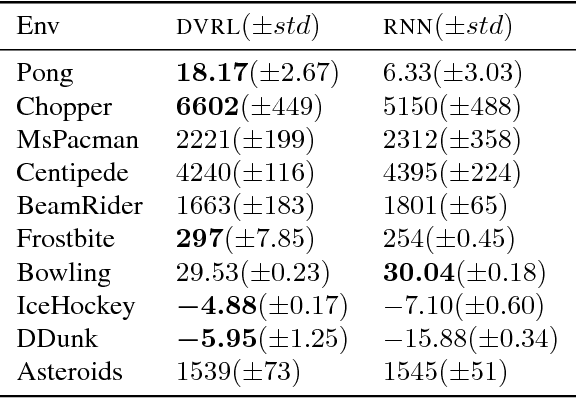
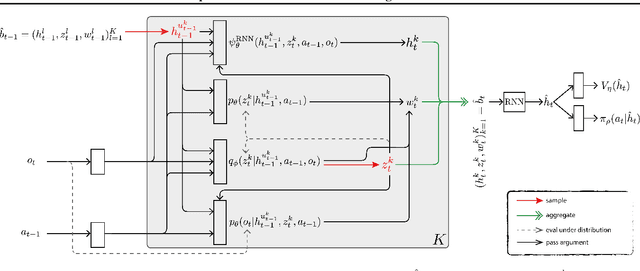
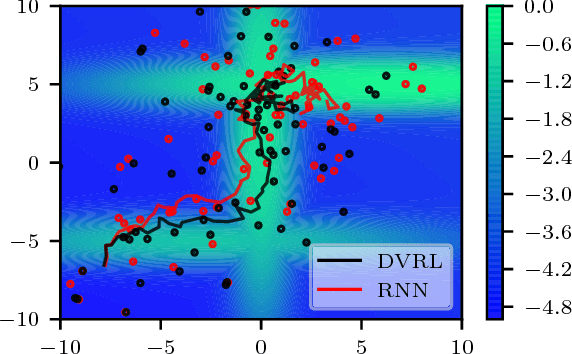
Many real-world sequential decision making problems are partially observable by nature, and the environment model is typically unknown. Consequently, there is great need for reinforcement learning methods that can tackle such problems given only a stream of incomplete and noisy observations. In this paper, we propose deep variational reinforcement learning (DVRL), which introduces an inductive bias that allows an agent to learn a generative model of the environment and perform inference in that model to effectively aggregate the available information. We develop an n-step approximation to the evidence lower bound (ELBO), allowing the model to be trained jointly with the policy. This ensures that the latent state representation is suitable for the control task. In experiments on Mountain Hike and flickering Atari we show that our method outperforms previous approaches relying on recurrent neural networks to encode the past.
QMIX: Monotonic Value Function Factorisation for Deep Multi-Agent Reinforcement Learning
Jun 06, 2018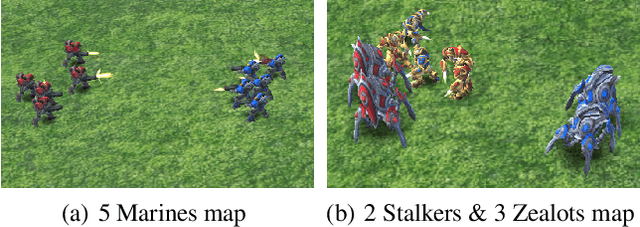
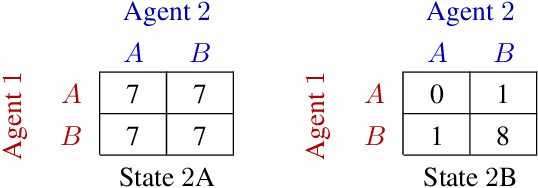
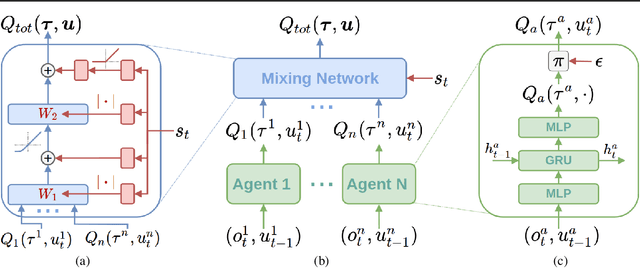
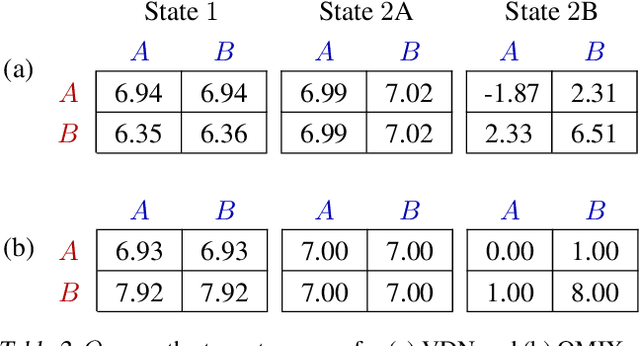
In many real-world settings, a team of agents must coordinate their behaviour while acting in a decentralised way. At the same time, it is often possible to train the agents in a centralised fashion in a simulated or laboratory setting, where global state information is available and communication constraints are lifted. Learning joint action-values conditioned on extra state information is an attractive way to exploit centralised learning, but the best strategy for then extracting decentralised policies is unclear. Our solution is QMIX, a novel value-based method that can train decentralised policies in a centralised end-to-end fashion. QMIX employs a network that estimates joint action-values as a complex non-linear combination of per-agent values that condition only on local observations. We structurally enforce that the joint-action value is monotonic in the per-agent values, which allows tractable maximisation of the joint action-value in off-policy learning, and guarantees consistency between the centralised and decentralised policies. We evaluate QMIX on a challenging set of StarCraft II micromanagement tasks, and show that QMIX significantly outperforms existing value-based multi-agent reinforcement learning methods.
Fourier Policy Gradients
May 30, 2018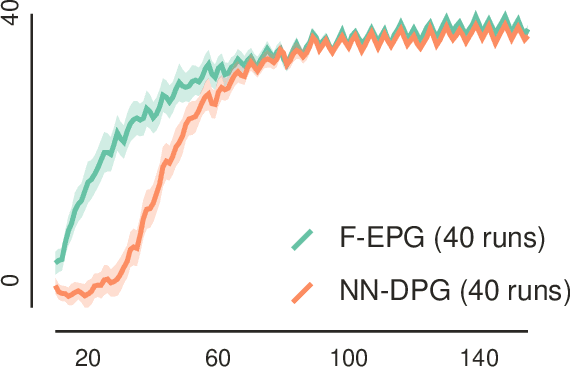
We propose a new way of deriving policy gradient updates for reinforcement learning. Our technique, based on Fourier analysis, recasts integrals that arise with expected policy gradients as convolutions and turns them into multiplications. The obtained analytical solutions allow us to capture the low variance benefits of EPG in a broad range of settings. For the critic, we treat trigonometric and radial basis functions, two function families with the universal approximation property. The choice of policy can be almost arbitrary, including mixtures or hybrid continuous-discrete probability distributions. Moreover, we derive a general family of sample-based estimators for stochastic policy gradients, which unifies existing results on sample-based approximation. We believe that this technique has the potential to shape the next generation of policy gradient approaches, powered by analytical results.
Stabilising Experience Replay for Deep Multi-Agent Reinforcement Learning
May 21, 2018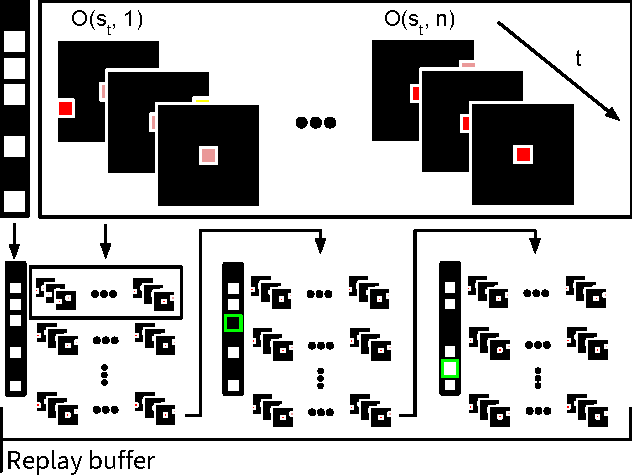

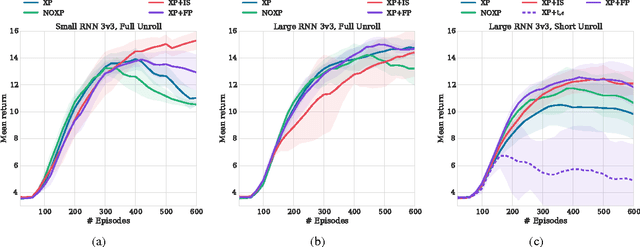
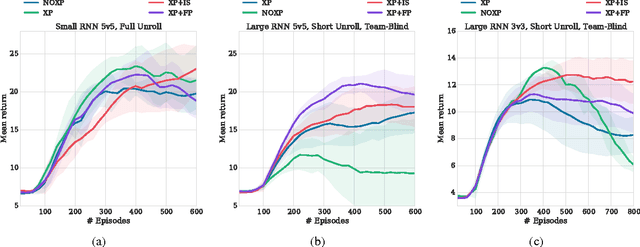
Many real-world problems, such as network packet routing and urban traffic control, are naturally modeled as multi-agent reinforcement learning (RL) problems. However, existing multi-agent RL methods typically scale poorly in the problem size. Therefore, a key challenge is to translate the success of deep learning on single-agent RL to the multi-agent setting. A major stumbling block is that independent Q-learning, the most popular multi-agent RL method, introduces nonstationarity that makes it incompatible with the experience replay memory on which deep Q-learning relies. This paper proposes two methods that address this problem: 1) using a multi-agent variant of importance sampling to naturally decay obsolete data and 2) conditioning each agent's value function on a fingerprint that disambiguates the age of the data sampled from the replay memory. Results on a challenging decentralised variant of StarCraft unit micromanagement confirm that these methods enable the successful combination of experience replay with multi-agent RL.
Expected Policy Gradients
Apr 13, 2018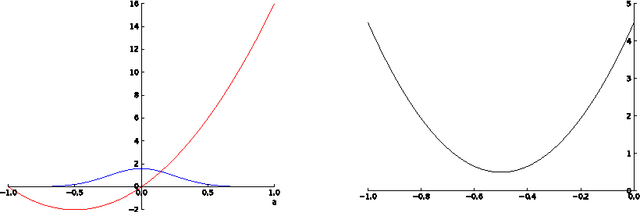
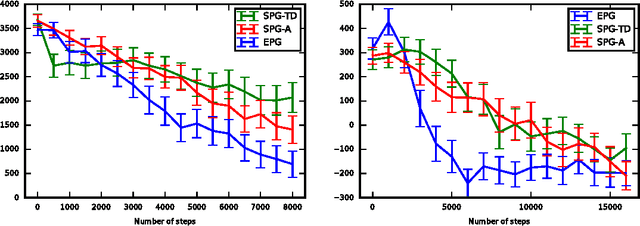
We propose expected policy gradients (EPG), which unify stochastic policy gradients (SPG) and deterministic policy gradients (DPG) for reinforcement learning. Inspired by expected sarsa, EPG integrates across the action when estimating the gradient, instead of relying only on the action in the sampled trajectory. We establish a new general policy gradient theorem, of which the stochastic and deterministic policy gradient theorems are special cases. We also prove that EPG reduces the variance of the gradient estimates without requiring deterministic policies and, for the Gaussian case, with no computational overhead. Finally, we show that it is optimal in a certain sense to explore with a Gaussian policy such that the covariance is proportional to the exponential of the scaled Hessian of the critic with respect to the actions. We present empirical results confirming that this new form of exploration substantially outperforms DPG with the Ornstein-Uhlenbeck heuristic in four challenging MuJoCo domains.
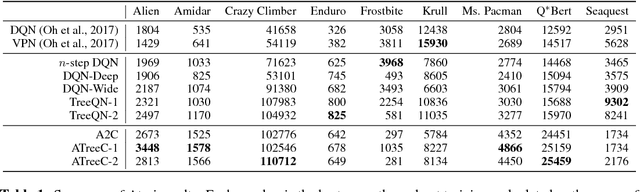
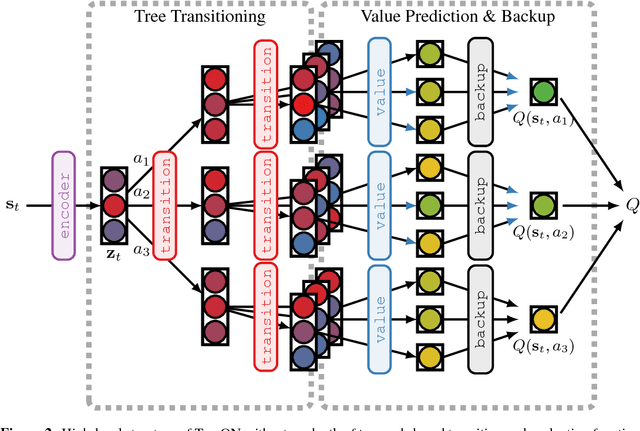
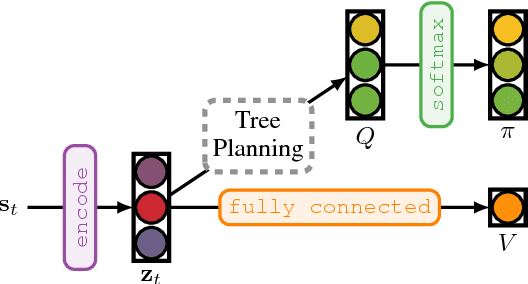
TreeQN and ATreeC: Differentiable Tree-Structured Models for Deep Reinforcement Learning
Mar 08, 2018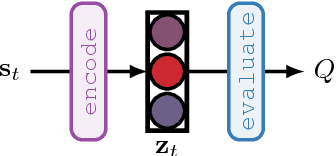
Combining deep model-free reinforcement learning with on-line planning is a promising approach to building on the successes of deep RL. On-line planning with look-ahead trees has proven successful in environments where transition models are known a priori. However, in complex environments where transition models need to be learned from data, the deficiencies of learned models have limited their utility for planning. To address these challenges, we propose TreeQN, a differentiable, recursive, tree-structured model that serves as a drop-in replacement for any value function network in deep RL with discrete actions. TreeQN dynamically constructs a tree by recursively applying a transition model in a learned abstract state space and then aggregating predicted rewards and state-values using a tree backup to estimate Q-values. We also propose ATreeC, an actor-critic variant that augments TreeQN with a softmax layer to form a stochastic policy network. Both approaches are trained end-to-end, such that the learned model is optimised for its actual use in the tree. We show that TreeQN and ATreeC outperform n-step DQN and A2C on a box-pushing task, as well as n-step DQN and value prediction networks (Oh et al. 2017) on multiple Atari games. Furthermore, we present ablation studies that demonstrate the effect of different auxiliary losses on learning transition models.