 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOla Shorinwa
Splat-Nav: Safe Real-Time Robot Navigation in Gaussian Splatting Maps
Mar 05, 2024
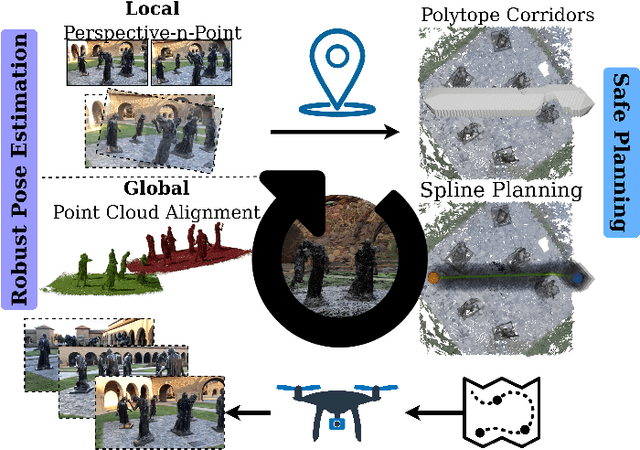
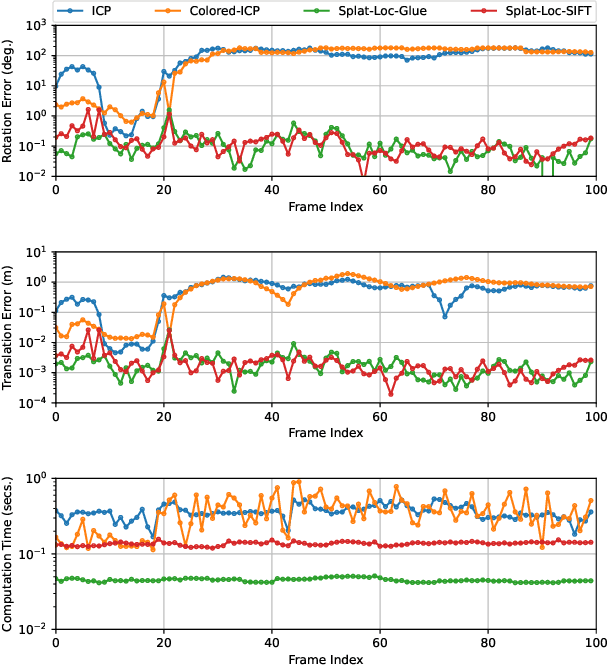
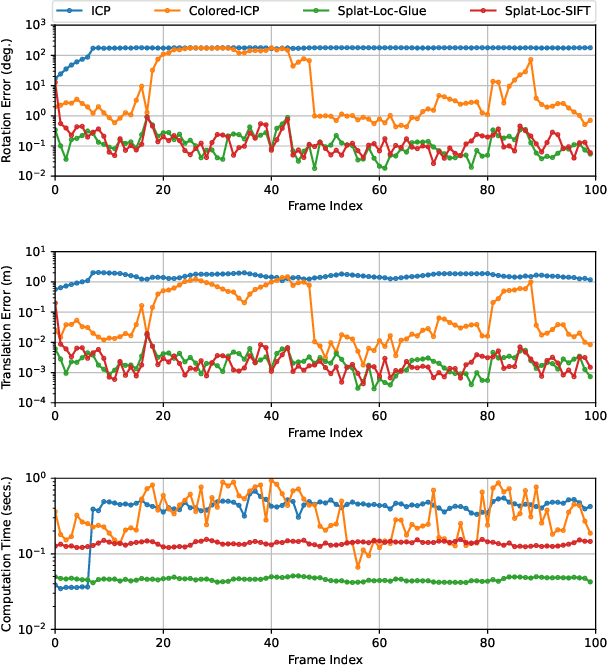
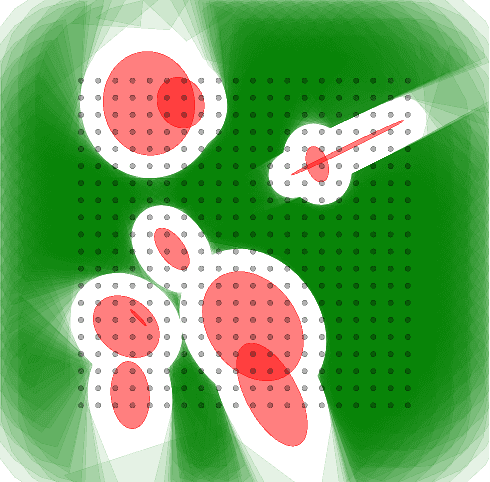
We present Splat-Nav, a navigation pipeline that consists of a real-time safe planning module and a robust state estimation module designed to operate in the Gaussian Splatting (GSplat) environment representation, a popular emerging 3D scene representation from computer vision. We formulate rigorous collision constraints that can be computed quickly to build a guaranteed-safe polytope corridor through the map. We then optimize a B-spline trajectory through this corridor. We also develop a real-time, robust state estimation module by interpreting the GSplat representation as a point cloud. The module enables the robot to localize its global pose with zero prior knowledge from RGB-D images using point cloud alignment, and then track its own pose as it moves through the scene from RGB images using image-to-point cloud localization. We also incorporate semantics into the GSplat in order to obtain better images for localization. All of these modules operate mainly on CPU, freeing up GPU resources for tasks like real-time scene reconstruction. We demonstrate the safety and robustness of our pipeline in both simulation and hardware, where we show re-planning at 5 Hz and pose estimation at 20 Hz, an order of magnitude faster than Neural Radiance Field (NeRF)-based navigation methods, thereby enabling real-time navigation.
Distributed Optimization Methods for Multi-Robot Systems: Part II -- A Survey
Jan 26, 2023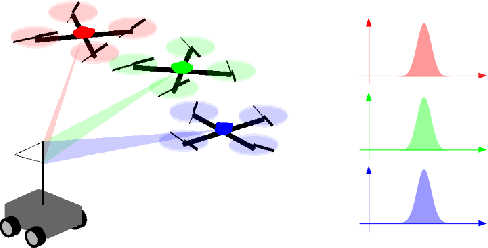
Although the field of distributed optimization is well-developed, relevant literature focused on the application of distributed optimization to multi-robot problems is limited. This survey constitutes the second part of a two-part series on distributed optimization applied to multi-robot problems. In this paper, we survey three main classes of distributed optimization algorithms -- distributed first-order methods, distributed sequential convex programming methods, and alternating direction method of multipliers (ADMM) methods -- focusing on fully-distributed methods that do not require coordination or computation by a central computer. We describe the fundamental structure of each category and note important variations around this structure, designed to address its associated drawbacks. Further, we provide practical implications of noteworthy assumptions made by distributed optimization algorithms, noting the classes of robotics problems suitable for these algorithms. Moreover, we identify important open research challenges in distributed optimization, specifically for robotics problem.
Distributed Optimization Methods for Multi-Robot Systems: Part I -- A Tutorial
Jan 26, 2023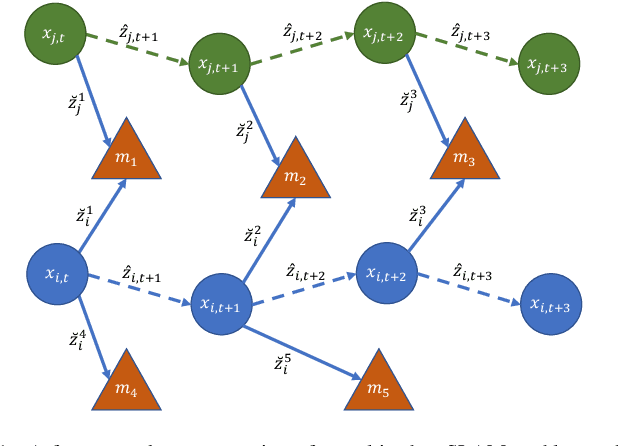
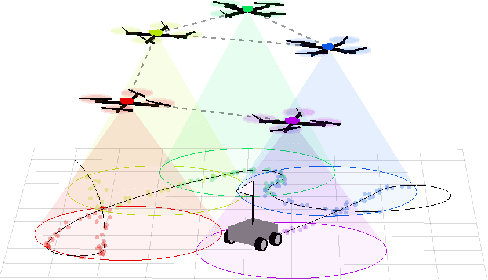
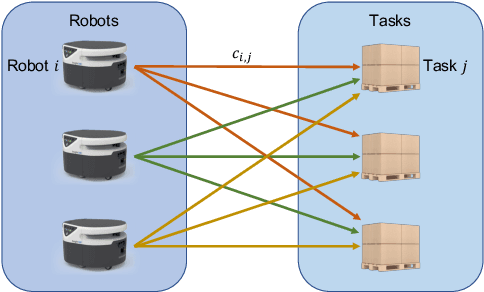
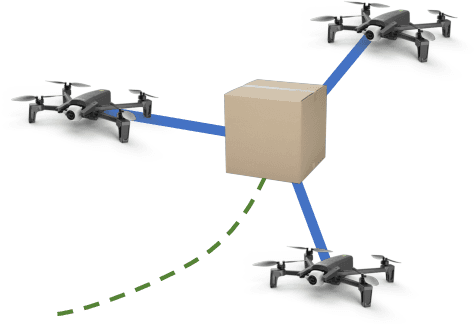
Distributed optimization provides a framework for deriving distributed algorithms for a variety of multi-robot problems. This tutorial constitutes the first part of a two-part series on distributed optimization applied to multi-robot problems, which seeks to advance the application of distributed optimization in robotics. In this tutorial, we demonstrate that many canonical multi-robot problems can be cast within the distributed optimization framework, such as multi-robot simultaneous localization and planning (SLAM), multi-robot target tracking, and multi-robot task assignment problems. We identify three broad categories of distributed optimization algorithms: distributed first-order methods, distributed sequential convex programming, and the alternating direction method of multipliers (ADMM). We describe the basic structure of each category and provide representative algorithms within each category. We then work through a simulation case study of multiple drones collaboratively tracking a ground vehicle. We compare solutions to this problem using a number of different distributed optimization algorithms. In addition, we implement a distributed optimization algorithm in hardware on a network of Rasberry Pis communicating with XBee modules to illustrate robustness to the challenges of real-world communication networks.
A Survey of Distributed Optimization Methods for Multi-Robot Systems
Mar 23, 2021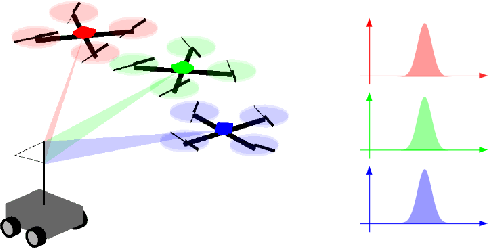
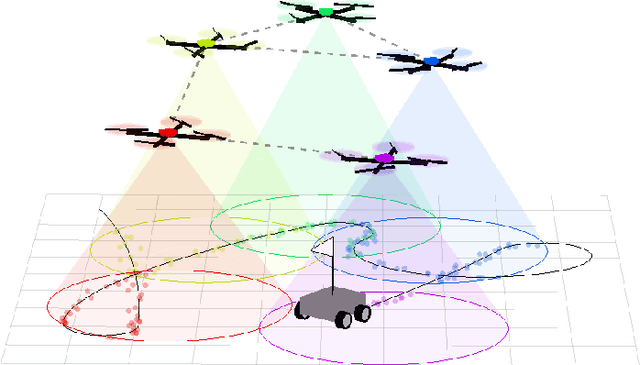
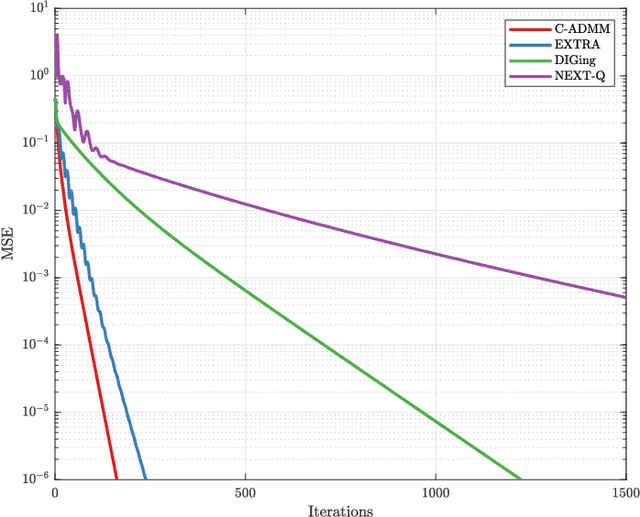
Distributed optimization consists of multiple computation nodes working together to minimize a common objective function through local computation iterations and network-constrained communication steps. In the context of robotics, distributed optimization algorithms can enable multi-robot systems to accomplish tasks in the absence of centralized coordination. We present a general framework for applying distributed optimization as a module in a robotics pipeline. We survey several classes of distributed optimization algorithms and assess their practical suitability for multi-robot applications. We further compare the performance of different classes of algorithms in simulations for three prototypical multi-robot problem scenarios. The Consensus Alternating Direction Method of Multipliers (C-ADMM) emerges as a particularly attractive and versatile distributed optimization method for multi-robot systems.
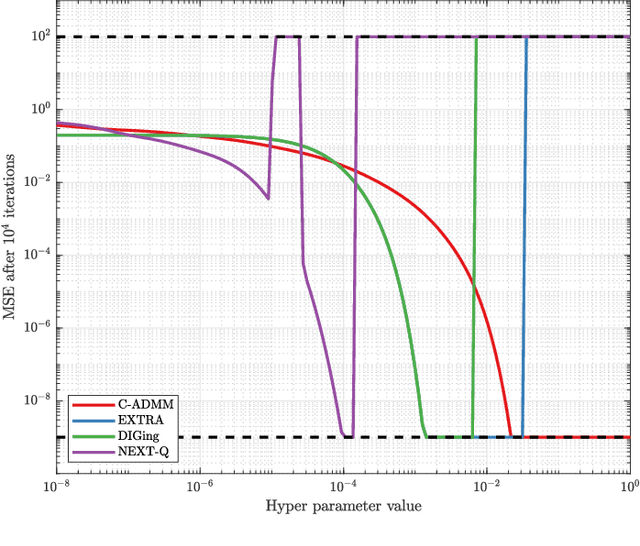
Distributed Multi-Target Tracking for Autonomous Vehicle Fleets
Apr 13, 2020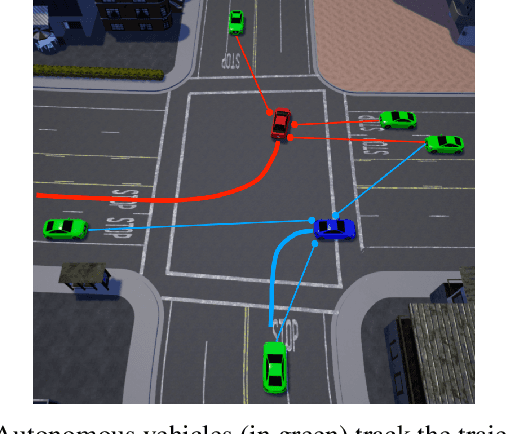
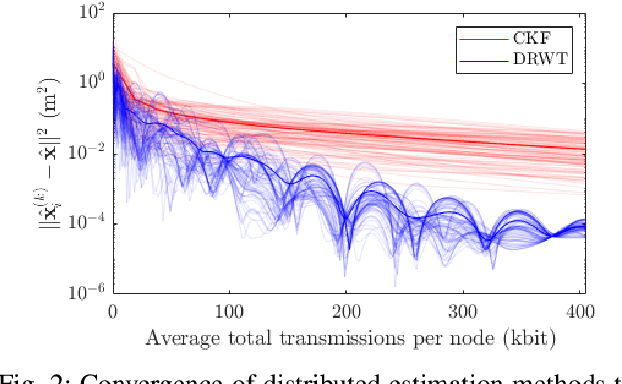
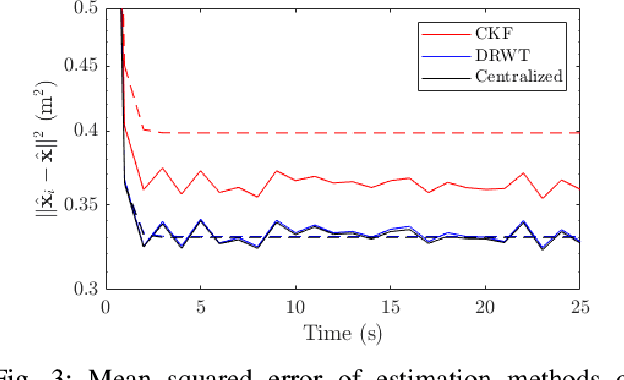
We present a scalable distributed target tracking algorithm based on the alternating direction method of multipliers that is well-suited for a fleet of autonomous cars communicating over a vehicle-to-vehicle network. Each sensing vehicle communicates with its neighbors to execute iterations of a Kalman filter-like update such that each agent's estimate approximates the centralized maximum a posteriori estimate without requiring the communication of measurements. We show that our method outperforms the Consensus Kalman Filter in recovering the centralized estimate given a fixed communication bandwidth. We also demonstrate the algorithm in a high fidelity urban driving simulator (CARLA), in which 50 autonomous cars connected on a time-varying communication network track the positions and velocities of 50 target vehicles using on-board cameras.