 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMichal Valko
Model-Free Learning for Two-Player Zero-Sum Partially Observable Markov Games with Perfect Recall
Jun 11, 2021
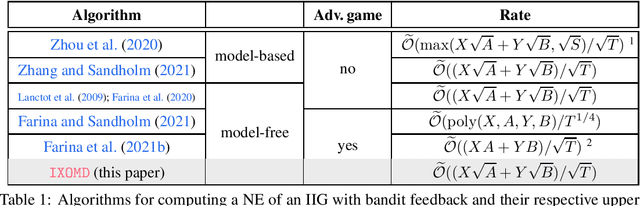
We study the problem of learning a Nash equilibrium (NE) in an imperfect information game (IIG) through self-play. Precisely, we focus on two-player, zero-sum, episodic, tabular IIG under the perfect-recall assumption where the only feedback is realizations of the game (bandit feedback). In particular, the dynamic of the IIG is not known -- we can only access it by sampling or interacting with a game simulator. For this learning setting, we provide the Implicit Exploration Online Mirror Descent (IXOMD) algorithm. It is a model-free algorithm with a high-probability bound on the convergence rate to the NE of order $1/\sqrt{T}$ where $T$ is the number of played games. Moreover, IXOMD is computationally efficient as it needs to perform the updates only along the sampled trajectory.
Taylor Expansion of Discount Factors
Jun 11, 2021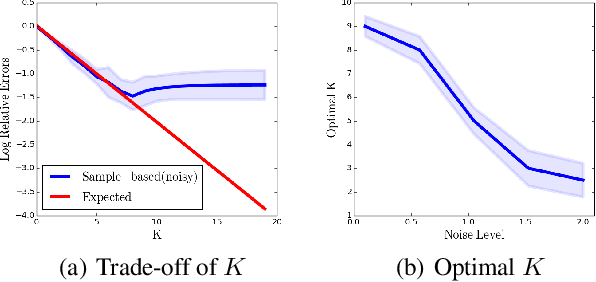
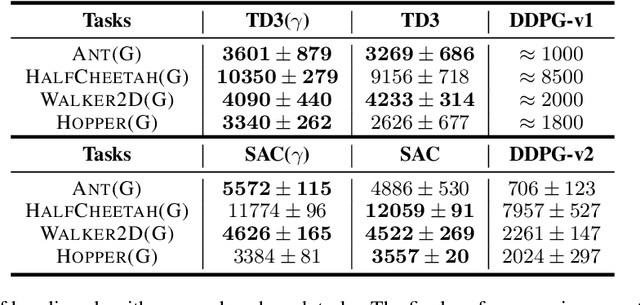
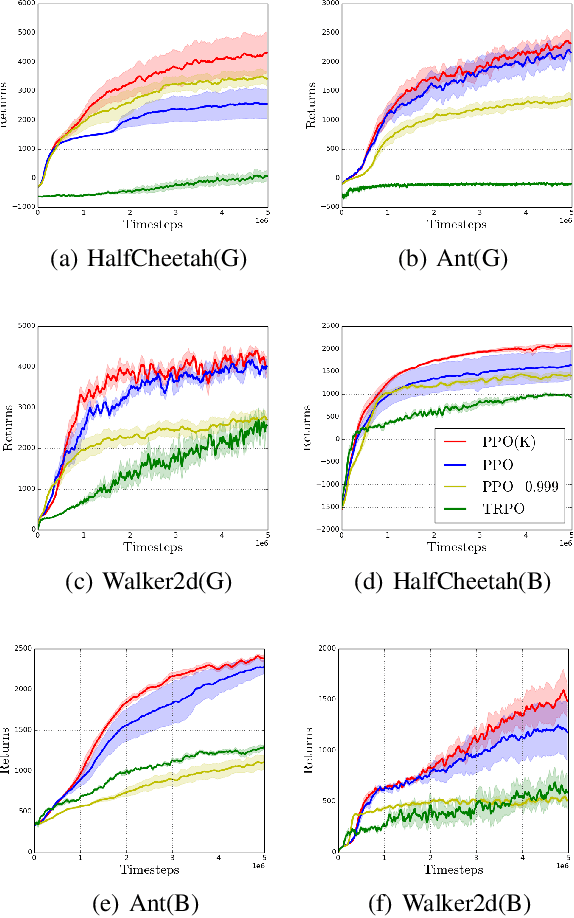
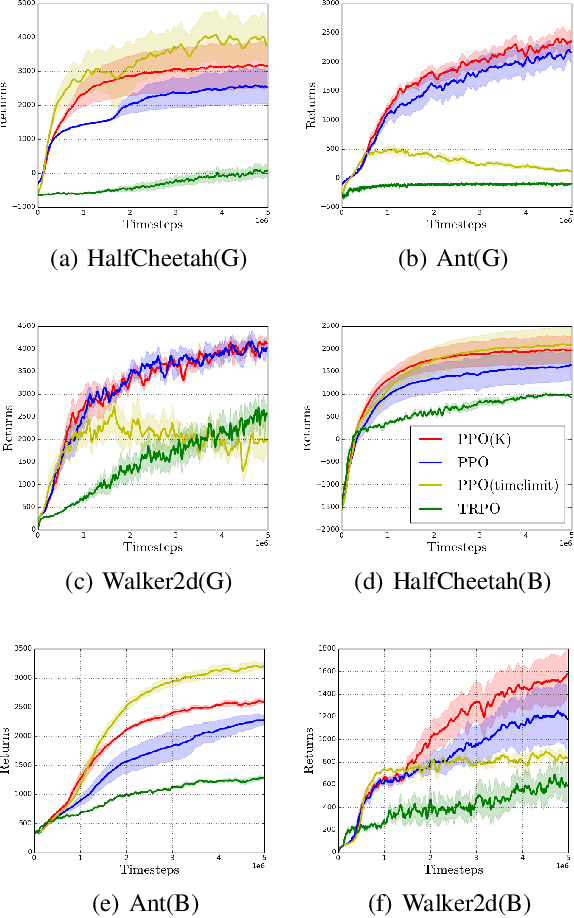
In practical reinforcement learning (RL), the discount factor used for estimating value functions often differs from that used for defining the evaluation objective. In this work, we study the effect that this discrepancy of discount factors has during learning, and discover a family of objectives that interpolate value functions of two distinct discount factors. Our analysis suggests new ways for estimating value functions and performing policy optimization updates, which demonstrate empirical performance gains. This framework also leads to new insights on commonly-used deep RL heuristic modifications to policy optimization algorithms.
Stochastic Shortest Path: Minimax, Parameter-Free and Towards Horizon-Free Regret
Apr 22, 2021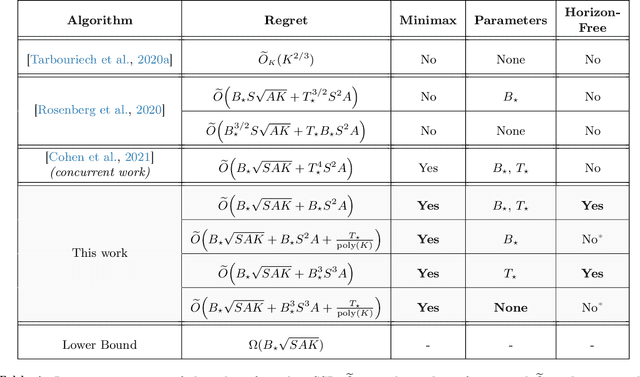
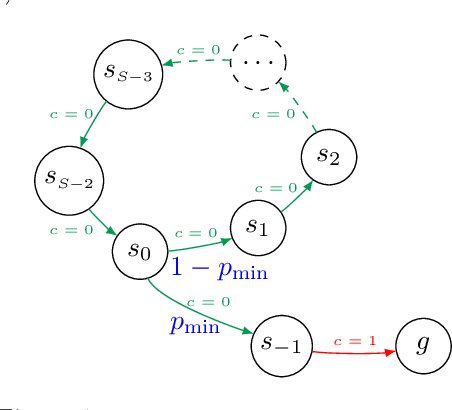
We study the problem of learning in the stochastic shortest path (SSP) setting, where an agent seeks to minimize the expected cost accumulated before reaching a goal state. We design a novel model-based algorithm EB-SSP that carefully skews the empirical transitions and perturbs the empirical costs with an exploration bonus to guarantee both optimism and convergence of the associated value iteration scheme. We prove that EB-SSP achieves the minimax regret rate $\widetilde{O}(B_{\star} \sqrt{S A K})$, where $K$ is the number of episodes, $S$ is the number of states, $A$ is the number of actions and $B_{\star}$ bounds the expected cumulative cost of the optimal policy from any state, thus closing the gap with the lower bound. Interestingly, EB-SSP obtains this result while being parameter-free, i.e., it does not require any prior knowledge of $B_{\star}$, nor of $T_{\star}$ which bounds the expected time-to-goal of the optimal policy from any state. Furthermore, we illustrate various cases (e.g., positive costs, or general costs when an order-accurate estimate of $T_{\star}$ is available) where the regret only contains a logarithmic dependence on $T_{\star}$, thus yielding the first horizon-free regret bound beyond the finite-horizon MDP setting.
Broaden Your Views for Self-Supervised Video Learning
Mar 30, 2021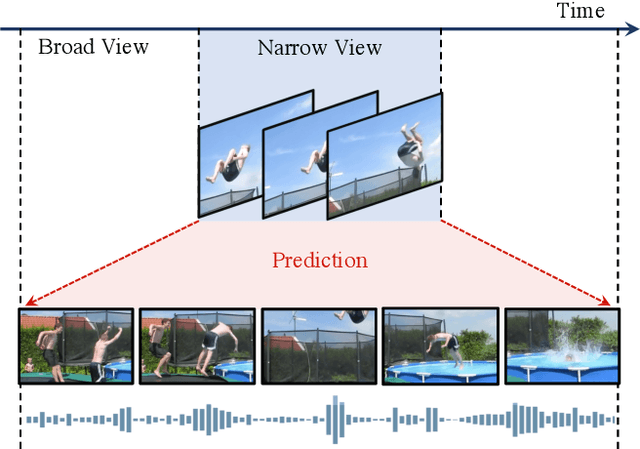
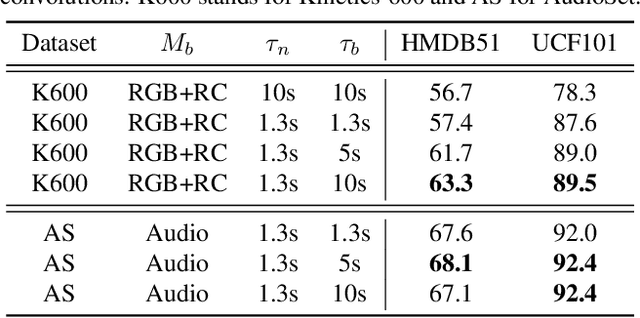
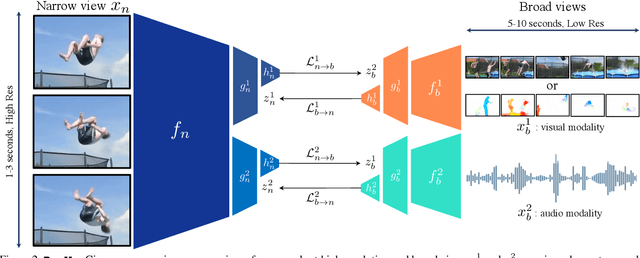
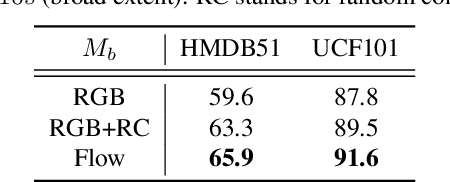
Most successful self-supervised learning methods are trained to align the representations of two independent views from the data. State-of-the-art methods in video are inspired by image techniques, where these two views are similarly extracted by cropping and augmenting the resulting crop. However, these methods miss a crucial element in the video domain: time. We introduce BraVe, a self-supervised learning framework for video. In BraVe, one of the views has access to a narrow temporal window of the video while the other view has a broad access to the video content. Our models learn to generalise from the narrow view to the general content of the video. Furthermore, BraVe processes the views with different backbones, enabling the use of alternative augmentations or modalities into the broad view such as optical flow, randomly convolved RGB frames, audio or their combinations. We demonstrate that BraVe achieves state-of-the-art results in self-supervised representation learning on standard video and audio classification benchmarks including UCF101, HMDB51, Kinetics, ESC-50 and AudioSet.
UCB Momentum Q-learning: Correcting the bias without forgetting
Mar 01, 2021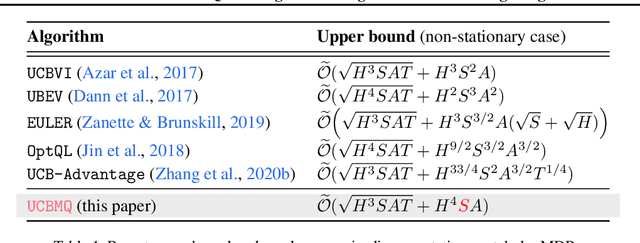
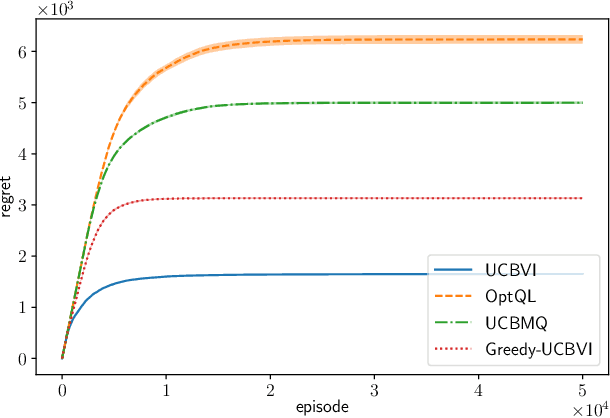
We propose UCBMQ, Upper Confidence Bound Momentum Q-learning, a new algorithm for reinforcement learning in tabular and possibly stage-dependent, episodic Markov decision process. UCBMQ is based on Q-learning where we add a momentum term and rely on the principle of optimism in face of uncertainty to deal with exploration. Our new technical ingredient of UCBMQ is the use of momentum to correct the bias that Q-learning suffers while, at the same time, limiting the impact it has on the second-order term of the regret. For UCBMQ , we are able to guarantee a regret of at most $O(\sqrt{H^3SAT}+ H^4 S A )$ where $H$ is the length of an episode, $S$ the number of states, $A$ the number of actions, $T$ the number of episodes and ignoring terms in poly$log(SAHT)$. Notably, UCBMQ is the first algorithm that simultaneously matches the lower bound of $\Omega(\sqrt{H^3SAT})$ for large enough $T$ and has a second-order term (with respect to the horizon $T$) that scales only linearly with the number of states $S$.
Revisiting Peng's Q($λ$) for Modern Reinforcement Learning
Feb 27, 2021
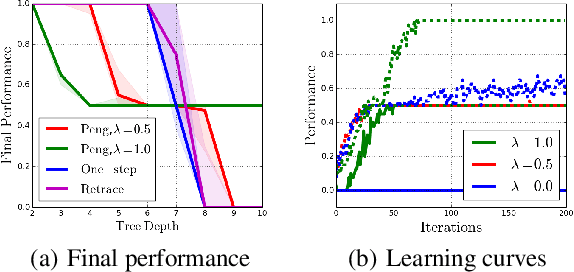

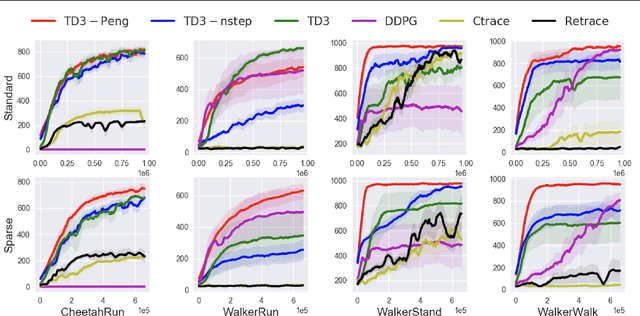
Off-policy multi-step reinforcement learning algorithms consist of conservative and non-conservative algorithms: the former actively cut traces, whereas the latter do not. Recently, Munos et al. (2016) proved the convergence of conservative algorithms to an optimal Q-function. In contrast, non-conservative algorithms are thought to be unsafe and have a limited or no theoretical guarantee. Nonetheless, recent studies have shown that non-conservative algorithms empirically outperform conservative ones. Motivated by the empirical results and the lack of theory, we carry out theoretical analyses of Peng's Q($\lambda$), a representative example of non-conservative algorithms. We prove that it also converges to an optimal policy provided that the behavior policy slowly tracks a greedy policy in a way similar to conservative policy iteration. Such a result has been conjectured to be true but has not been proven. We also experiment with Peng's Q($\lambda$) in complex continuous control tasks, confirming that Peng's Q($\lambda$) often outperforms conservative algorithms despite its simplicity. These results indicate that Peng's Q($\lambda$), which was thought to be unsafe, is a theoretically-sound and practically effective algorithm.
Mine Your Own vieW: Self-Supervised Learning Through Across-Sample Prediction
Feb 19, 2021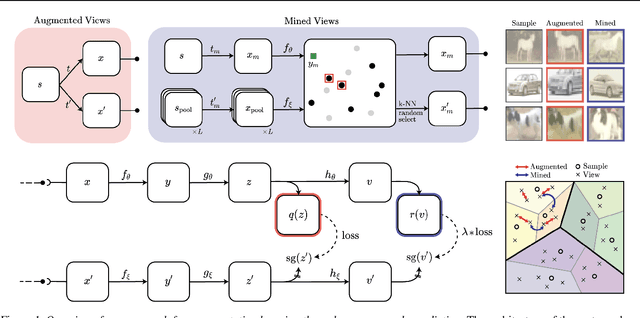
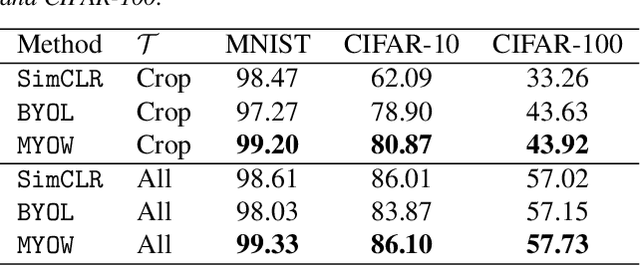
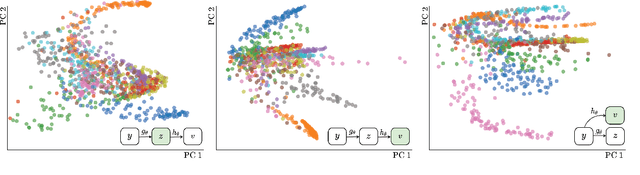
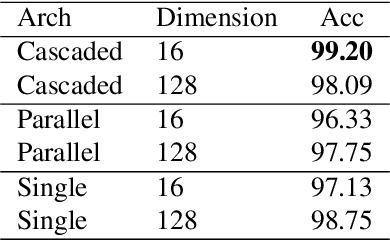
State-of-the-art methods for self-supervised learning (SSL) build representations by maximizing the similarity between different augmented "views" of a sample. Because these approaches try to match views of the same sample, they can be too myopic and fail to produce meaningful results when augmentations are not sufficiently rich. This motivates the use of the dataset itself to find similar, yet distinct, samples to serve as views for one another. In this paper, we introduce Mine Your Own vieW (MYOW), a new approach for building across-sample prediction into SSL. The idea behind our approach is to actively mine views, finding samples that are close in the representation space of the network, and then predict, from one sample's latent representation, the representation of a nearby sample. In addition to showing the promise of MYOW on standard datasets used in computer vision, we highlight the power of this idea in a novel application in neuroscience where rich augmentations are not already established. When applied to neural datasets, MYOW outperforms other self-supervised approaches in all examples (in some cases by more than 10%), and surpasses the supervised baseline for most datasets. By learning to predict the latent representation of similar samples, we show that it is possible to learn good representations in new domains where augmentations are still limited.
Bootstrapped Representation Learning on Graphs
Feb 12, 2021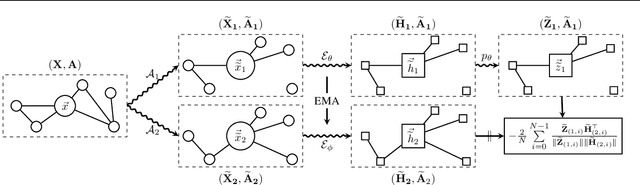
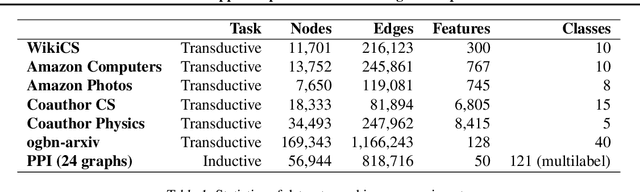
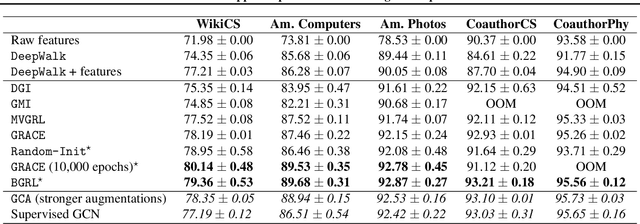
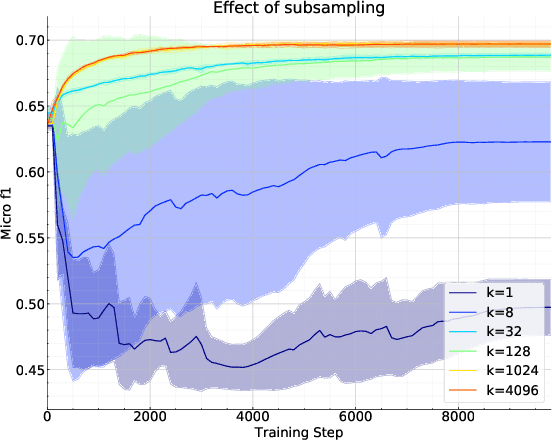
Current state-of-the-art self-supervised learning methods for graph neural networks (GNNs) are based on contrastive learning. As such, they heavily depend on the construction of augmentations and negative examples. For example, on the standard PPI benchmark, increasing the number of negative pairs improves performance, thereby requiring computation and memory cost quadratic in the number of nodes to achieve peak performance. Inspired by BYOL, a recently introduced method for self-supervised learning that does not require negative pairs, we present Bootstrapped Graph Latents, BGRL, a self-supervised graph representation method that gets rid of this potentially quadratic bottleneck. BGRL outperforms or matches the previous unsupervised state-of-the-art results on several established benchmark datasets. Moreover, it enables the effective usage of graph attentional (GAT) encoders, allowing us to further improve the state of the art. In particular on the PPI dataset, using GAT as an encoder we achieve state-of-the-art 70.49% Micro-F1, using the linear evaluation protocol. On all other datasets under consideration, our model is competitive with the equivalent supervised GNN results, often exceeding them.
Geometric Entropic Exploration
Jan 07, 2021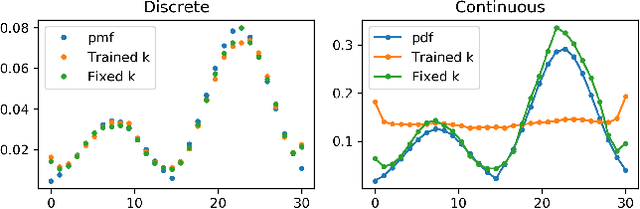
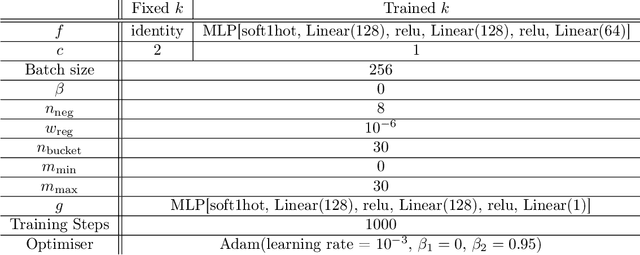
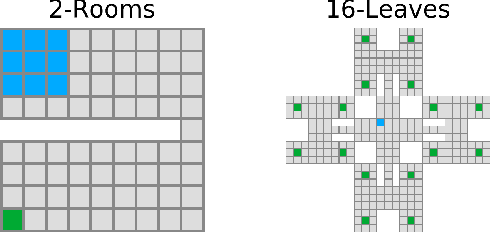
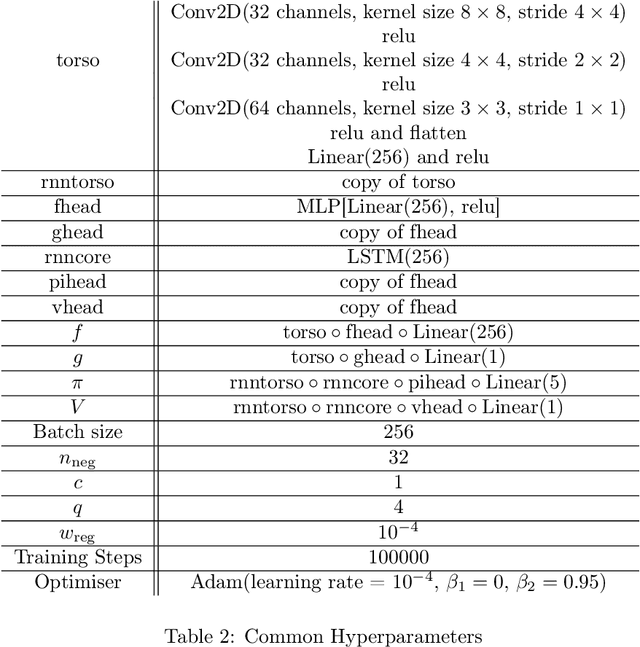
Exploration is essential for solving complex Reinforcement Learning (RL) tasks. Maximum State-Visitation Entropy (MSVE) formulates the exploration problem as a well-defined policy optimization problem whose solution aims at visiting all states as uniformly as possible. This is in contrast to standard uncertainty-based approaches where exploration is transient and eventually vanishes. However, existing approaches to MSVE are theoretically justified only for discrete state-spaces as they are oblivious to the geometry of continuous domains. We address this challenge by introducing Geometric Entropy Maximisation (GEM), a new algorithm that maximises the geometry-aware Shannon entropy of state-visits in both discrete and continuous domains. Our key theoretical contribution is casting geometry-aware MSVE exploration as a tractable problem of optimising a simple and novel noise-contrastive objective function. In our experiments, we show the efficiency of GEM in solving several RL problems with sparse rewards, compared against other deep RL exploration approaches.