 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMichael R. Zhang
Unlearnable Algorithms for In-context Learning
Feb 01, 2024
Machine unlearning is a desirable operation as models get increasingly deployed on data with unknown provenance. However, achieving exact unlearning -- obtaining a model that matches the model distribution when the data to be forgotten was never used -- is challenging or inefficient, often requiring significant retraining. In this paper, we focus on efficient unlearning methods for the task adaptation phase of a pretrained large language model (LLM). We observe that an LLM's ability to do in-context learning for task adaptation allows for efficient exact unlearning of task adaptation training data. We provide an algorithm for selecting few-shot training examples to prepend to the prompt given to an LLM (for task adaptation), ERASE, whose unlearning operation cost is independent of model and dataset size, meaning it scales to large models and datasets. We additionally compare our approach to fine-tuning approaches and discuss the trade-offs between the two approaches. This leads us to propose a new holistic measure of unlearning cost which accounts for varying inference costs, and conclude that in-context learning can often be more favourable than fine-tuning for deployments involving unlearning requests.
Using Large Language Models for Hyperparameter Optimization
Dec 07, 2023This paper studies using foundational large language models (LLMs) to make decisions during hyperparameter optimization (HPO). Empirical evaluations demonstrate that in settings with constrained search budgets, LLMs can perform comparably or better than traditional HPO methods like random search and Bayesian optimization on standard benchmarks. Furthermore, we propose to treat the code specifying our model as a hyperparameter, which the LLM outputs, going beyond the capabilities of existing HPO approaches. Our findings suggest that LLMs are a promising tool for improving efficiency in the traditional decision-making problem of hyperparameter optimization.
Boosted Prompt Ensembles for Large Language Models
Apr 12, 2023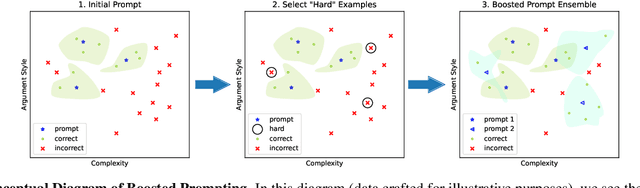
Methods such as chain-of-thought prompting and self-consistency have pushed the frontier of language model reasoning performance with no additional training. To further improve performance, we propose a prompt ensembling method for large language models, which uses a small dataset to construct a set of few shot prompts that together comprise a ``boosted prompt ensemble''. The few shot examples for each prompt are chosen in a stepwise fashion to be ``hard'' examples on which the previous step's ensemble is uncertain. We show that this outperforms single-prompt output-space ensembles and bagged prompt-space ensembles on the GSM8k and AQuA datasets, among others. We propose both train-time and test-time versions of boosted prompting that use different levels of available annotation and conduct a detailed empirical study of our algorithm.
Multi-Rate VAE: Train Once, Get the Full Rate-Distortion Curve
Dec 07, 2022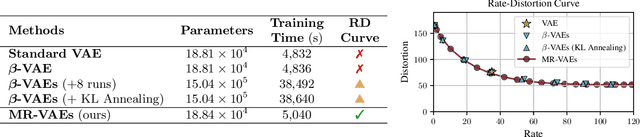
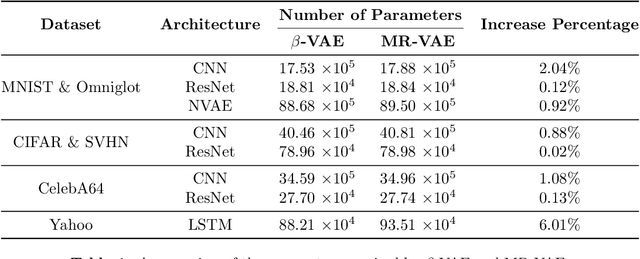
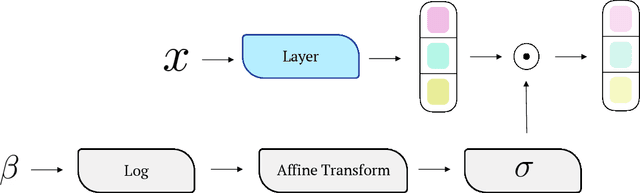
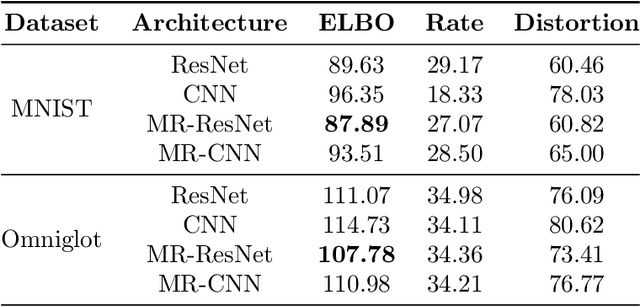
Variational autoencoders (VAEs) are powerful tools for learning latent representations of data used in a wide range of applications. In practice, VAEs usually require multiple training rounds to choose the amount of information the latent variable should retain. This trade-off between the reconstruction error (distortion) and the KL divergence (rate) is typically parameterized by a hyperparameter $\beta$. In this paper, we introduce Multi-Rate VAE (MR-VAE), a computationally efficient framework for learning optimal parameters corresponding to various $\beta$ in a single training run. The key idea is to explicitly formulate a response function that maps $\beta$ to the optimal parameters using hypernetworks. MR-VAEs construct a compact response hypernetwork where the pre-activations are conditionally gated based on $\beta$. We justify the proposed architecture by analyzing linear VAEs and showing that it can represent response functions exactly for linear VAEs. With the learned hypernetwork, MR-VAEs can construct the rate-distortion curve without additional training and can be deployed with significantly less hyperparameter tuning. Empirically, our approach is competitive and often exceeds the performance of multiple $\beta$-VAEs training with minimal computation and memory overheads.
Learning Domain Invariant Representations in Goal-conditioned Block MDPs
Oct 28, 2021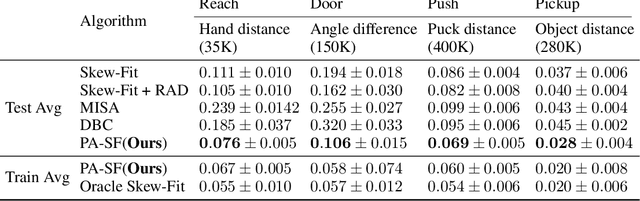
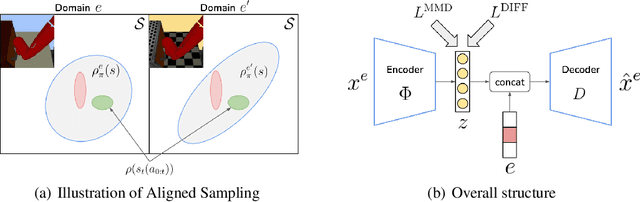
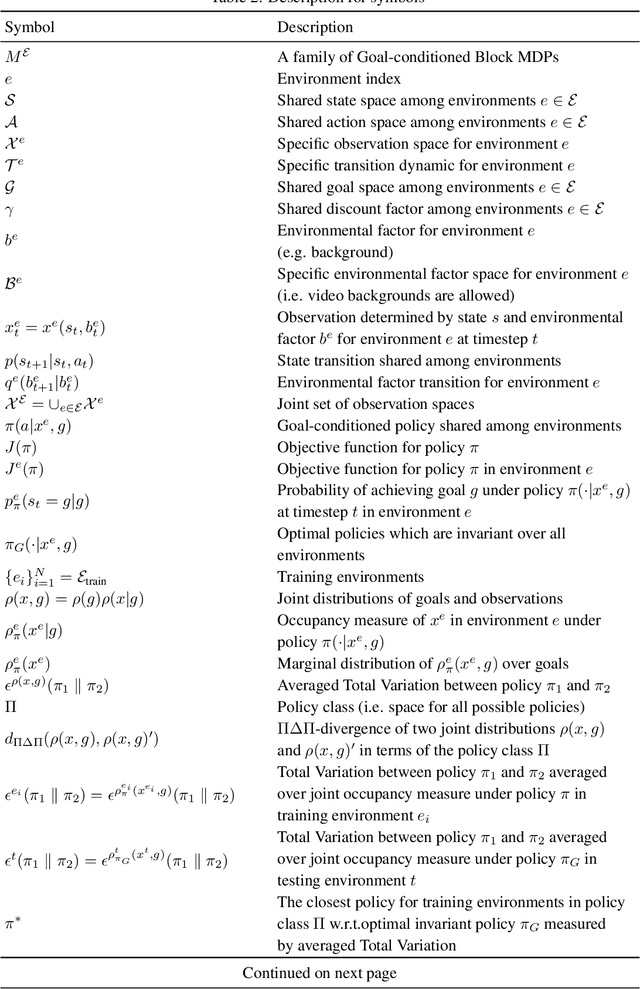
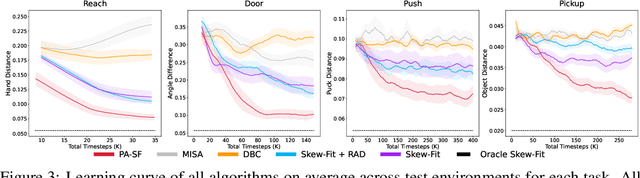
Deep Reinforcement Learning (RL) is successful in solving many complex Markov Decision Processes (MDPs) problems. However, agents often face unanticipated environmental changes after deployment in the real world. These changes are often spurious and unrelated to the underlying problem, such as background shifts for visual input agents. Unfortunately, deep RL policies are usually sensitive to these changes and fail to act robustly against them. This resembles the problem of domain generalization in supervised learning. In this work, we study this problem for goal-conditioned RL agents. We propose a theoretical framework in the Block MDP setting that characterizes the generalizability of goal-conditioned policies to new environments. Under this framework, we develop a practical method PA-SkewFit that enhances domain generalization. The empirical evaluation shows that our goal-conditioned RL agent can perform well in various unseen test environments, improving by 50% over baselines.
* 33 pages
Autoregressive Dynamics Models for Offline Policy Evaluation and Optimization
Apr 28, 2021

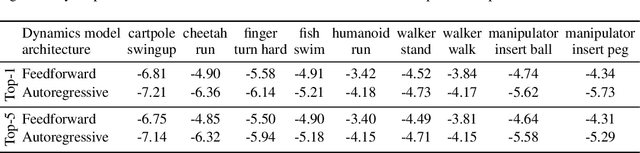

Standard dynamics models for continuous control make use of feedforward computation to predict the conditional distribution of next state and reward given current state and action using a multivariate Gaussian with a diagonal covariance structure. This modeling choice assumes that different dimensions of the next state and reward are conditionally independent given the current state and action and may be driven by the fact that fully observable physics-based simulation environments entail deterministic transition dynamics. In this paper, we challenge this conditional independence assumption and propose a family of expressive autoregressive dynamics models that generate different dimensions of the next state and reward sequentially conditioned on previous dimensions. We demonstrate that autoregressive dynamics models indeed outperform standard feedforward models in log-likelihood on heldout transitions. Furthermore, we compare different model-based and model-free off-policy evaluation (OPE) methods on RL Unplugged, a suite of offline MuJoCo datasets, and find that autoregressive dynamics models consistently outperform all baselines, achieving a new state-of-the-art. Finally, we show that autoregressive dynamics models are useful for offline policy optimization by serving as a way to enrich the replay buffer through data augmentation and improving performance using model-based planning.
Analyzing Monotonic Linear Interpolation in Neural Network Loss Landscapes
Apr 23, 2021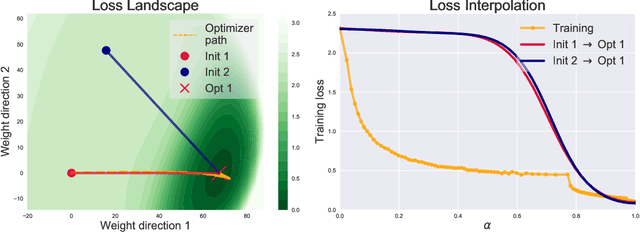


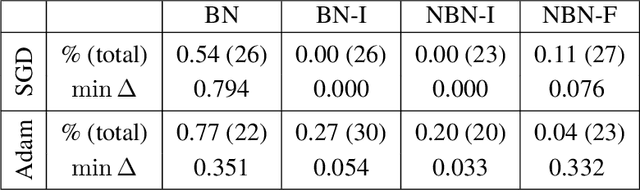
Linear interpolation between initial neural network parameters and converged parameters after training with stochastic gradient descent (SGD) typically leads to a monotonic decrease in the training objective. This Monotonic Linear Interpolation (MLI) property, first observed by Goodfellow et al. (2014) persists in spite of the non-convex objectives and highly non-linear training dynamics of neural networks. Extending this work, we evaluate several hypotheses for this property that, to our knowledge, have not yet been explored. Using tools from differential geometry, we draw connections between the interpolated paths in function space and the monotonicity of the network - providing sufficient conditions for the MLI property under mean squared error. While the MLI property holds under various settings (e.g. network architectures and learning problems), we show in practice that networks violating the MLI property can be produced systematically, by encouraging the weights to move far from initialization. The MLI property raises important questions about the loss landscape geometry of neural networks and highlights the need to further study their global properties.
Benchmarks for Deep Off-Policy Evaluation
Mar 30, 2021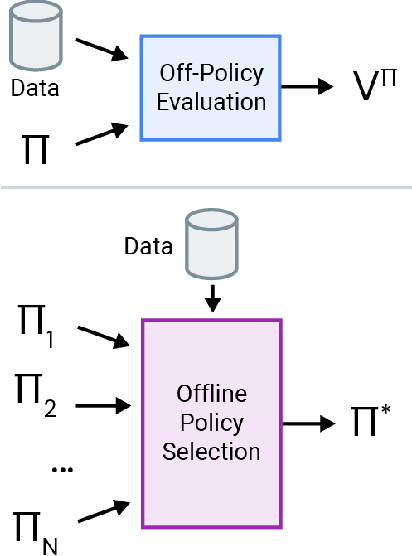
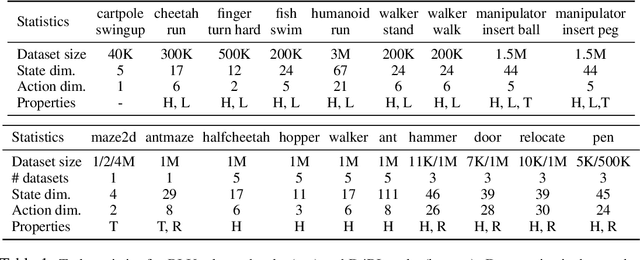
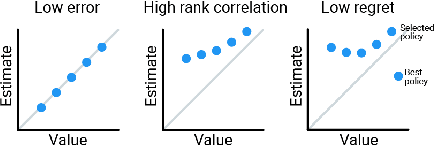
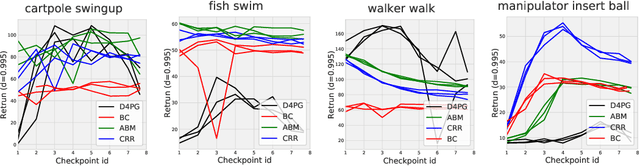
Off-policy evaluation (OPE) holds the promise of being able to leverage large, offline datasets for both evaluating and selecting complex policies for decision making. The ability to learn offline is particularly important in many real-world domains, such as in healthcare, recommender systems, or robotics, where online data collection is an expensive and potentially dangerous process. Being able to accurately evaluate and select high-performing policies without requiring online interaction could yield significant benefits in safety, time, and cost for these applications. While many OPE methods have been proposed in recent years, comparing results between papers is difficult because currently there is a lack of a comprehensive and unified benchmark, and measuring algorithmic progress has been challenging due to the lack of difficult evaluation tasks. In order to address this gap, we present a collection of policies that in conjunction with existing offline datasets can be used for benchmarking off-policy evaluation. Our tasks include a range of challenging high-dimensional continuous control problems, with wide selections of datasets and policies for performing policy selection. The goal of our benchmark is to provide a standardized measure of progress that is motivated from a set of principles designed to challenge and test the limits of existing OPE methods. We perform an evaluation of state-of-the-art algorithms and provide open-source access to our data and code to foster future research in this area.
Objective Social Choice: Using Auxiliary Information to Improve Voting Outcomes
Jan 27, 2020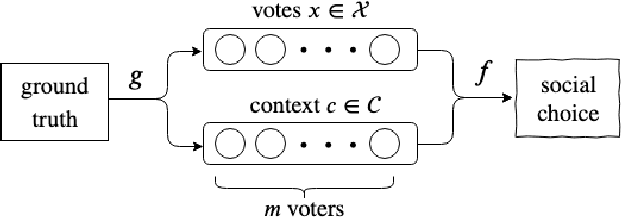
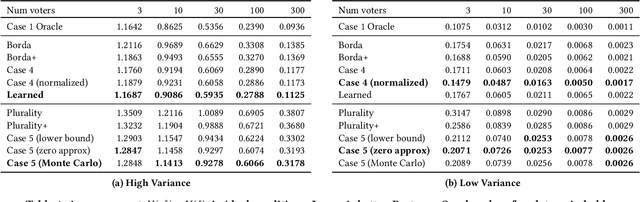
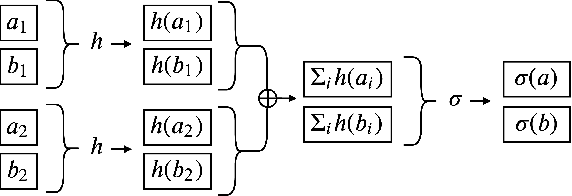
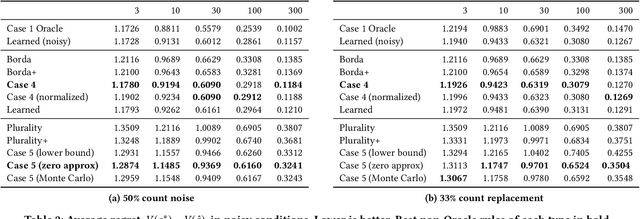
How should one combine noisy information from diverse sources to make an inference about an objective ground truth? This frequently recurring, normative question lies at the core of statistics, machine learning, policy-making, and everyday life. It has been called "combining forecasts", "meta-analysis", "ensembling", and the "MLE approach to voting", among other names. Past studies typically assume that noisy votes are identically and independently distributed (i.i.d.), but this assumption is often unrealistic. Instead, we assume that votes are independent but not necessarily identically distributed and that our ensembling algorithm has access to certain auxiliary information related to the underlying model governing the noise in each vote. In our present work, we: (1) define our problem and argue that it reflects common and socially relevant real world scenarios, (2) propose a multi-arm bandit noise model and count-based auxiliary information set, (3) derive maximum likelihood aggregation rules for ranked and cardinal votes under our noise model, (4) propose, alternatively, to learn an aggregation rule using an order-invariant neural network, and (5) empirically compare our rules to common voting rules and naive experience-weighted modifications. We find that our rules successfully use auxiliary information to outperform the naive baselines.
Lookahead Optimizer: k steps forward, 1 step back
Jul 19, 2019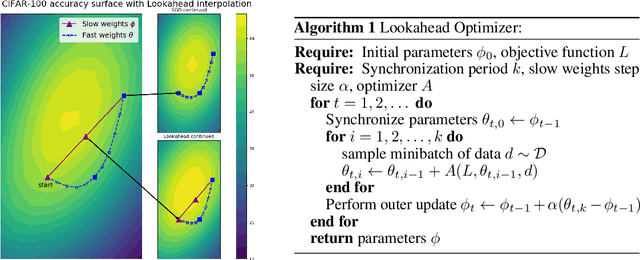
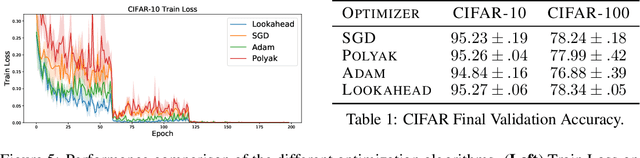
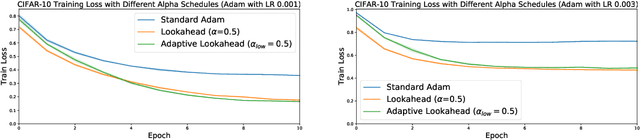
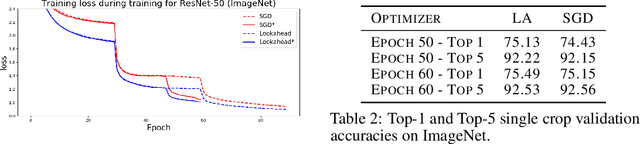
The vast majority of successful deep neural networks are trained using variants of stochastic gradient descent (SGD) algorithms. Recent attempts to improve SGD can be broadly categorized into two approaches: (1) adaptive learning rate schemes, such as AdaGrad and Adam, and (2) accelerated schemes, such as heavy-ball and Nesterov momentum. In this paper, we propose a new optimization algorithm, Lookahead, that is orthogonal to these previous approaches and iteratively updates two sets of weights. Intuitively, the algorithm chooses a search direction by \emph{looking ahead} at the sequence of "fast weights" generated by another optimizer. We show that Lookahead improves the learning stability and lowers the variance of its inner optimizer with negligible computation and memory cost. We empirically demonstrate Lookahead can significantly improve the performance of SGD and Adam, even with their default hyperparameter settings on ImageNet, CIFAR-10/100, neural machine translation, and Penn Treebank.