 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAS-MEF: Multi-exposure image fusion based on principal component analysis, adaptive well-exposedness and saliency map
May 25, 2021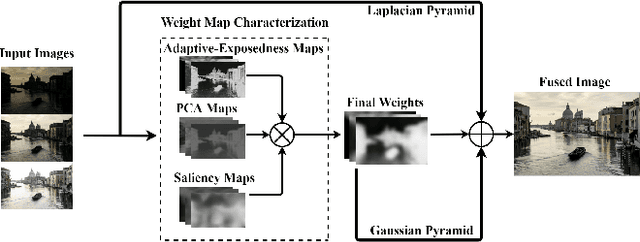
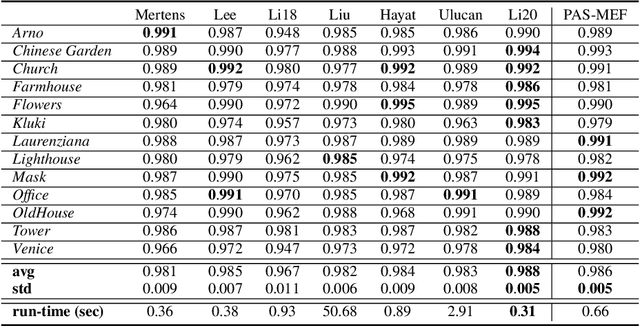
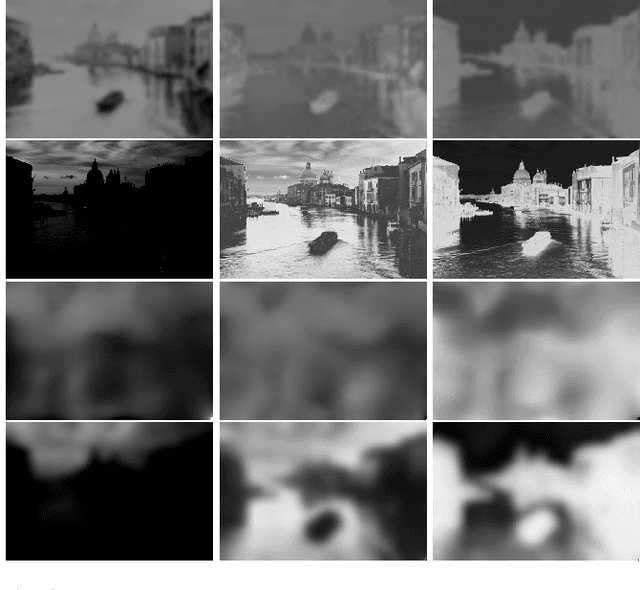

High dynamic range (HDR) imaging enables to immortalize natural scenes similar to the way that they are perceived by human observers. With regular low dynamic range (LDR) capture/display devices, significant details may not be preserved in images due to the huge dynamic range of natural scenes. To minimize the information loss and produce high quality HDR-like images for LDR screens, this study proposes an efficient multi-exposure fusion (MEF) approach with a simple yet effective weight extraction method relying on principal component analysis, adaptive well-exposedness and saliency maps. These weight maps are later refined through a guided filter and the fusion is carried out by employing a pyramidal decomposition. Experimental comparisons with existing techniques demonstrate that the proposed method produces very strong statistical and visual results.
On the Preservation of Spatio-temporal Information in Machine Learning Applications
Jun 15, 2020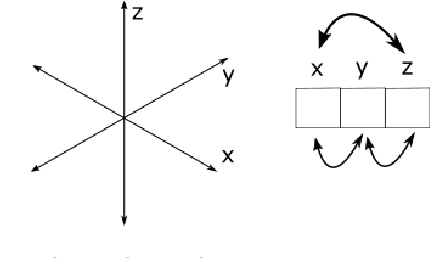
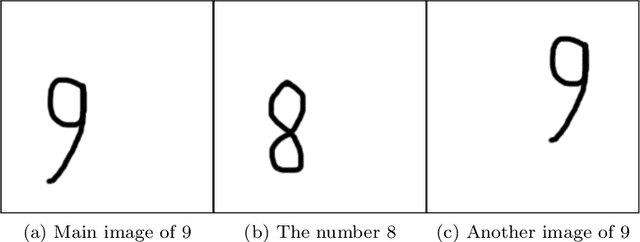
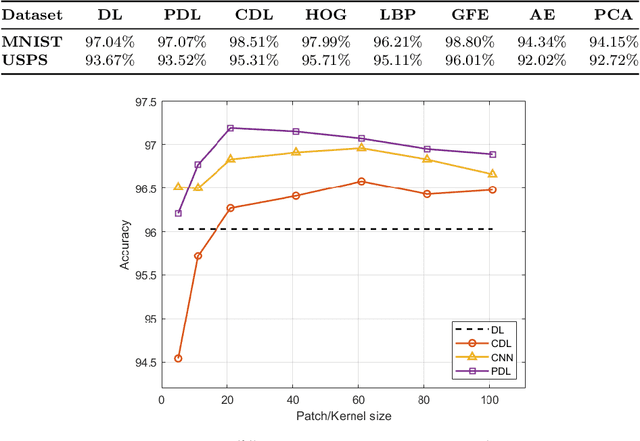
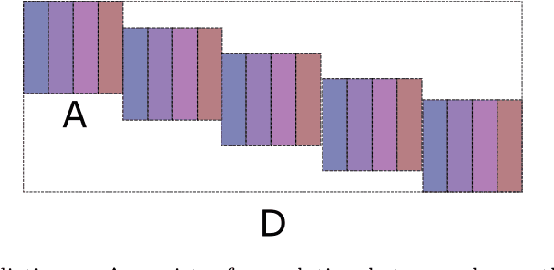
In conventional machine learning applications, each data attribute is assumed to be orthogonal to others. Namely, every pair of dimension is orthogonal to each other and thus there is no distinction of in-between relations of dimensions. However, this is certainly not the case in real world signals which naturally originate from a spatio-temporal configuration. As a result, the conventional vectorization process disrupts all of the spatio-temporal information about the order/place of data whether it be $1$D, $2$D, $3$D, or $4$D. In this paper, the problem of orthogonality is first investigated through conventional $k$-means of images, where images are to be processed as vectors. As a solution, shift-invariant $k$-means is proposed in a novel framework with the help of sparse representations. A generalization of shift-invariant $k$-means, convolutional dictionary learning, is then utilized as an unsupervised feature extraction method for classification. Experiments suggest that Gabor feature extraction as a simulation of shallow convolutional neural networks provides a little better performance compared to convolutional dictionary learning. Many alternatives of convolutional-logic are also discussed for spatio-temporal information preservation, including a spatio-temporal hypercomplex encoding scheme.
Evolutionary Simplicial Learning as a Generative and Compact Sparse Framework for Classification
May 14, 2020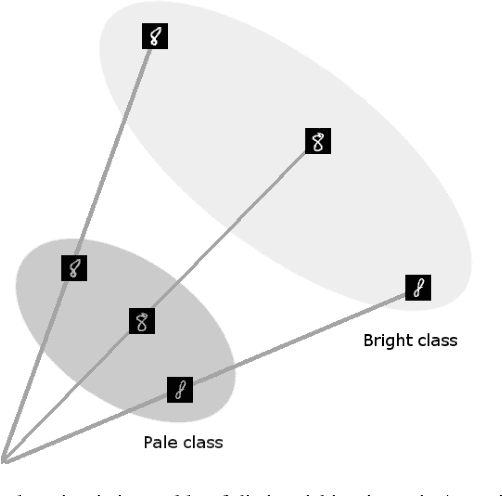

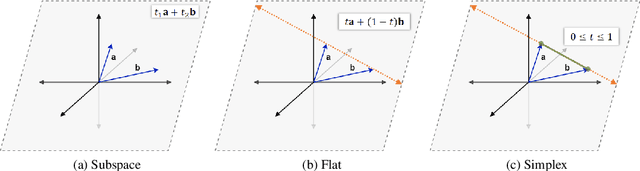
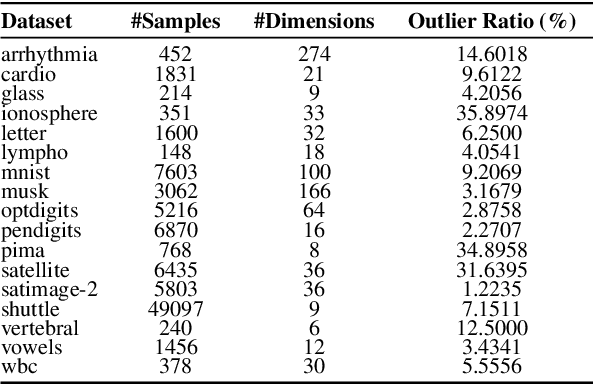
Dictionary learning for sparse representations has been successful in many reconstruction tasks. Simplicial learning is an adaptation of dictionary learning, where subspaces become clipped and acquire arbitrary offsets, taking the form of simplices. Such adaptation is achieved through additional constraints on sparse codes. Furthermore, an evolutionary approach can be chosen to determine the number and the dimensionality of simplices composing the simplicial, in which most generative and compact simplicials are favored. This paper proposes an evolutionary simplicial learning method as a generative and compact sparse framework for classification. The proposed approach is first applied on a one-class classification task and it appears as the most reliable method within the considered benchmark. Most surprising results are observed when evolutionary simplicial learning is considered within a multi-class classification task. Since sparse representations are generative in nature, they bear a fundamental problem of not being capable of distinguishing two classes lying on the same subspace. This claim is validated through synthetic experiments and superiority of simplicial learning even as a generative-only approach is demonstrated. Simplicial learning loses its superiority over discriminative methods in high-dimensional cases but can further be modified with discriminative elements to achieve state-of-the-art performance in classification tasks.
The Mimicry Game: Towards Self-recognition in Chatbots
Feb 06, 2020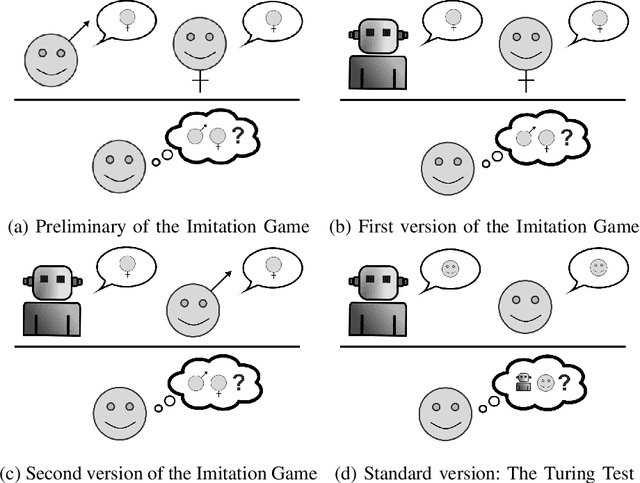
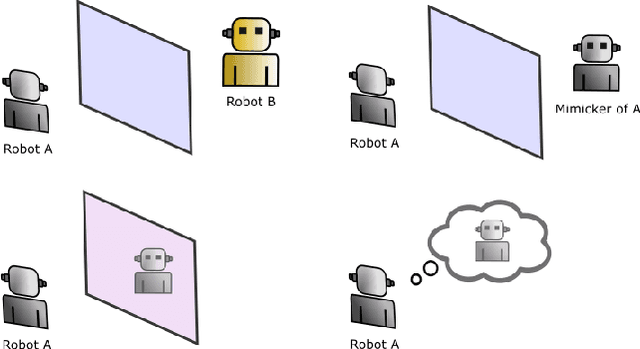
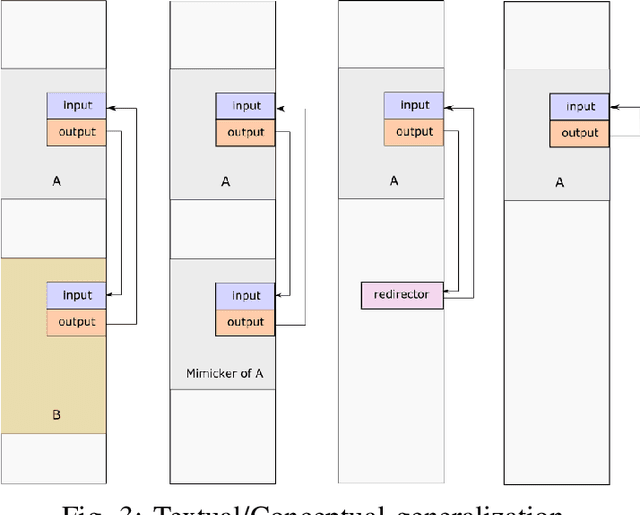

In standard Turing test, a machine has to prove its humanness to the judges. By successfully imitating a thinking entity such as a human, this machine then proves that it can also think. However, many objections are raised against the validity of this argument. Such objections claim that Turing test is not a tool to demonstrate existence of general intelligence or thinking activity. In this light, alternatives to Turing test are to be investigated. Self-recognition tests applied on animals through mirrors appear to be a viable alternative to demonstrate the existence of a type of general intelligence. Methodology here constructs a textual version of the mirror test by placing the chatbot (in this context) as the one and only judge to figure out whether the contacted one is an other, a mimicker, or oneself in an unsupervised manner. This textual version of the mirror test is objective, self-contained, and is mostly immune to objections raised against the Turing test. Any chatbot passing this textual mirror test should have or acquire a thought mechanism that can be referred to as the inner-voice, answering the original and long lasting question of Turing "Can machines think?" in a constructive manner.
Convolutional Neural Networks: A Binocular Vision Perspective
Dec 21, 2019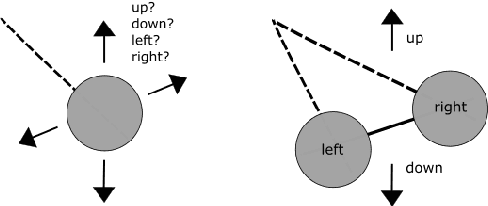
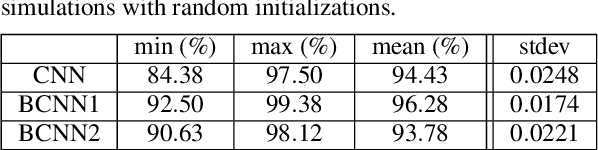
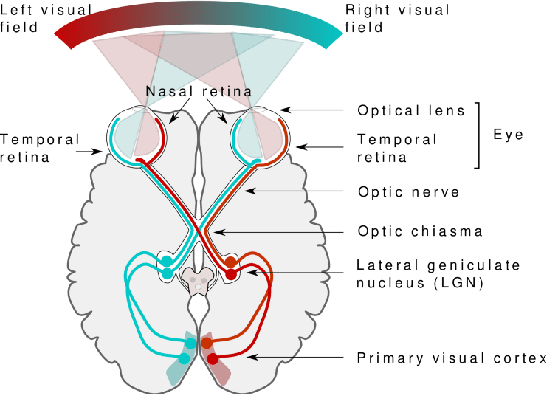

It is arguable that whether the single camera captured (monocular) image datasets are sufficient enough to train and test convolutional neural networks (CNNs) for imitating the biological neural network structures of the human brain. As human visual system works in binocular, the collaboration of the eyes with the two brain lobes needs more investigation for improvements in such CNN-based visual imagery analysis applications. It is indeed questionable that if respective visual fields of each eye and the associated brain lobes are responsible for different learning abilities of the same scene. There are such open questions in this field of research which need rigorous investigation in order to further understand the nature of the human visual system, hence improve the currently available deep learning applications. This position paper analyses a binocular CNNs architecture that is more analogous to the biological structure of the human visual system than the conventional deep learning techniques. While taking a structure called optic chiasma into account, this architecture consists of basically two parallel CNN structures associated with each visual field and the brain lobe, fully connected later possibly as in the primary visual cortex (V1). Experimental results demonstrate that binocular learning of two different visual fields leads to better classification rates on average, when compared to classical CNN architectures.
Autonomous Cars: Vision based Steering Wheel Angle Estimation
Jan 30, 2019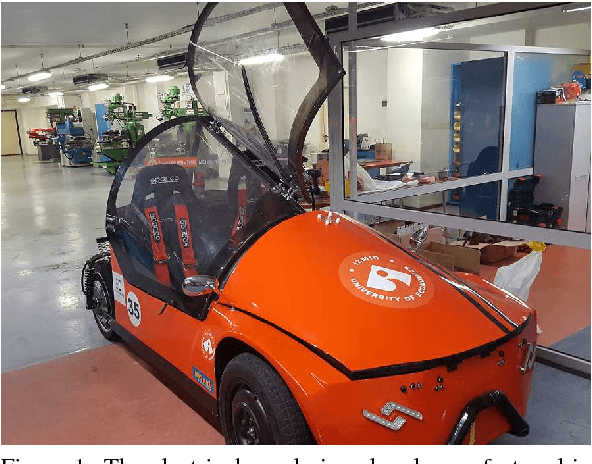
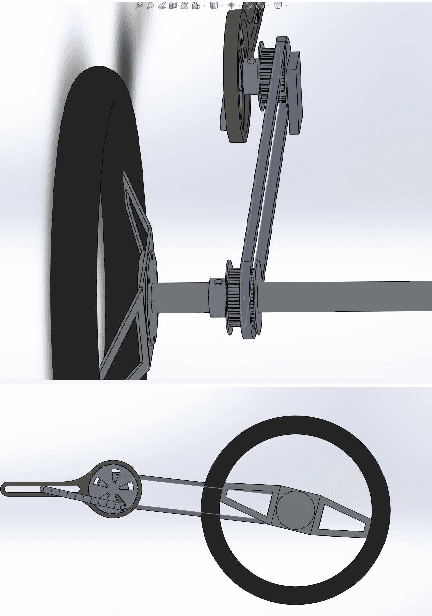
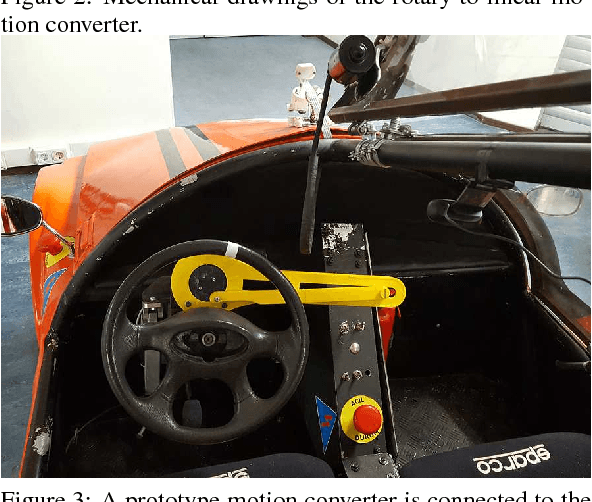
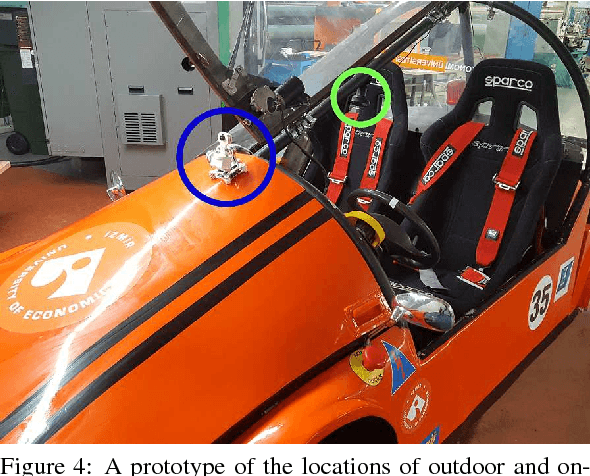
Machine learning models, which are frequently used in self-driving cars, are trained by matching the captured images of the road and the measured angle of the steering wheel. The angle of the steering wheel is generally fetched from steering angle sensor, which is tightly-coupled to the physical aspects of the vehicle at hand. Therefore, a model-agnostic autonomous car-kit is very difficult to be developed and autonomous vehicles need more training data. The proposed vision based steering angle estimation system argues a new approach which basically matches the images of the road captured by an outdoor camera and the images of the steering wheel from an onboard camera, avoiding the burden of collecting model-dependent training data and the use of any other electromechanical hardware.
Boosting Dictionary Learning with Error Codes
Jan 15, 2017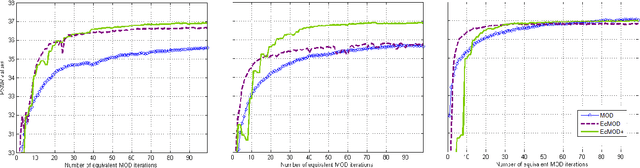
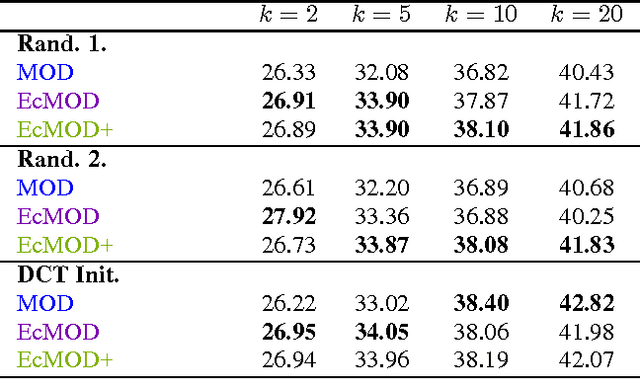
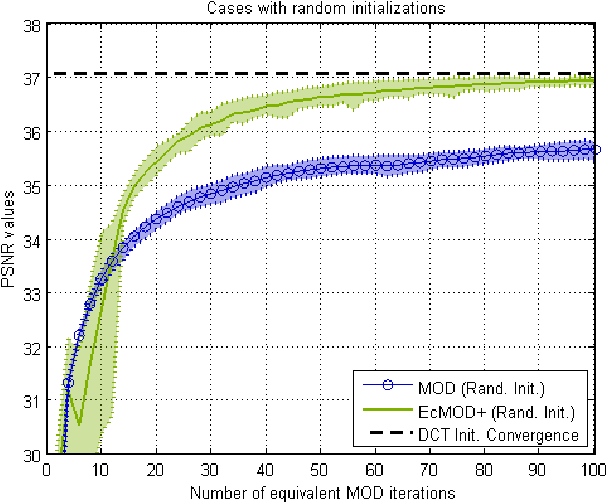
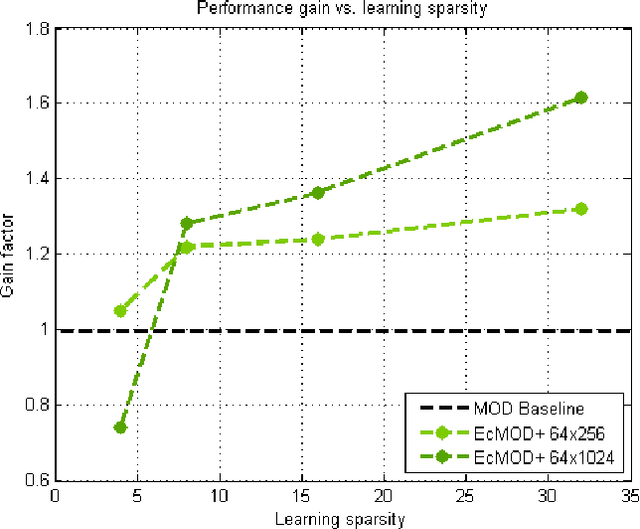
In conventional sparse representations based dictionary learning algorithms, initial dictionaries are generally assumed to be proper representatives of the system at hand. However, this may not be the case, especially in some systems restricted to random initializations. Therefore, a supposedly optimal state-update based on such an improper model might lead to undesired effects that will be conveyed to successive iterations. In this paper, we propose a dictionary learning method which includes a general feedback process that codes the intermediate error left over from a less intensive initial learning attempt, and then adjusts sparse codes accordingly. Experimental observations show that such an additional step vastly improves rates of convergence in high-dimensional cases, also results in better converged states in the case of random initializations. Improvements also scale up with more lenient sparsity constraints.