 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Corroborative Approach to Verification and Validation of Human--Robot Teams
Aug 15, 2018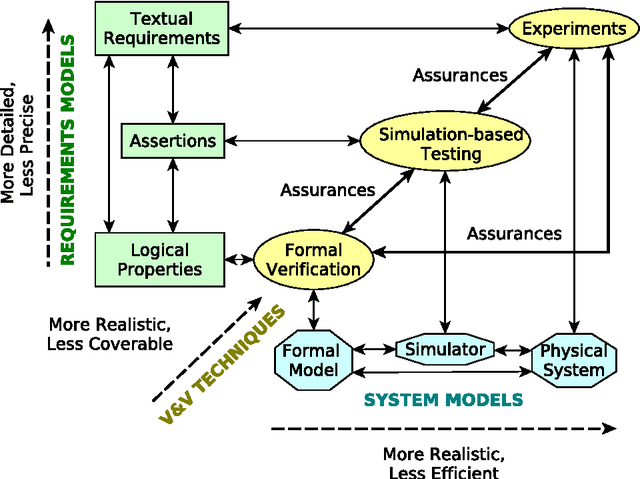
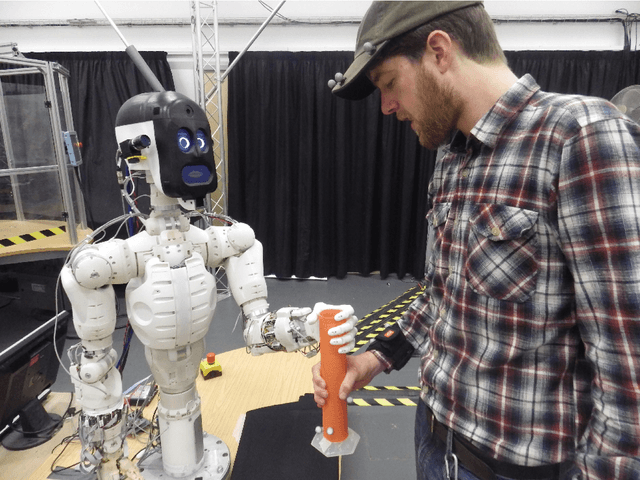
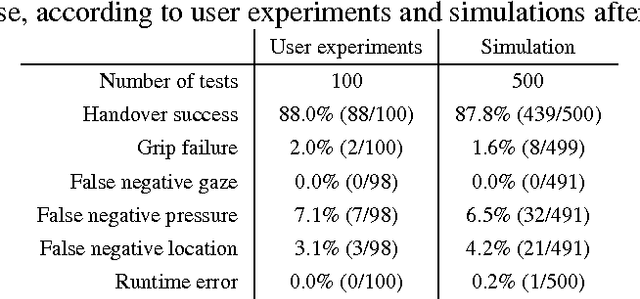
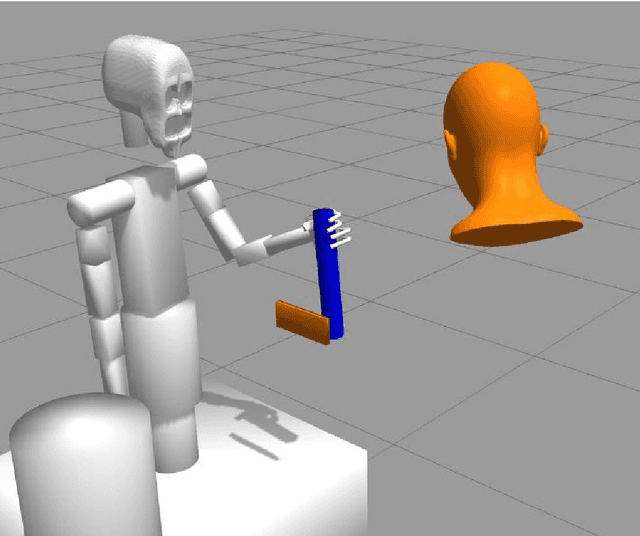
We present an approach for the verification and validation (V&V) of robot assistants in the context of human-robot interactions (HRI), to demonstrate their trustworthiness through corroborative evidence of their safety and functional correctness. Key challenges include the complex and unpredictable nature of the real world in which assistant and service robots operate, the limitations on available V&V techniques when used individually, and the consequent lack of confidence in the V&V results. Our approach, called corroborative V&V, addresses these challenges by combining several different V&V techniques; in this paper we use formal verification (model checking), simulation-based testing, and user validation in experiments with a real robot. We demonstrate our corroborative V&V approach through a handover task, the most critical part of a complex cooperative manufacturing scenario, for which we propose some safety and liveness requirements to verify and validate. We construct formal models, simulations and an experimental test rig for the HRI. To capture requirements we use temporal logic properties, assertion checkers and textual descriptions. This combination of approaches allows V&V of the HRI task at different levels of modelling detail and thoroughness of exploration, thus overcoming the individual limitations of each technique. Should the resulting V&V evidence present discrepancies, an iterative process between the different V&V techniques takes place until corroboration between the V&V techniques is gained from refining and improving the assets (i.e., system and requirement models) to represent the HRI task in a more truthful manner. Therefore, corroborative V&V affords a systematic approach to 'meta-V&V,' in which different V&V techniques can be used to corroborate and check one another, increasing the level of certainty in the results of V&V.
Effects of Faults, Experience, and Personality on Trust in a Robot Co-Worker
Mar 09, 2017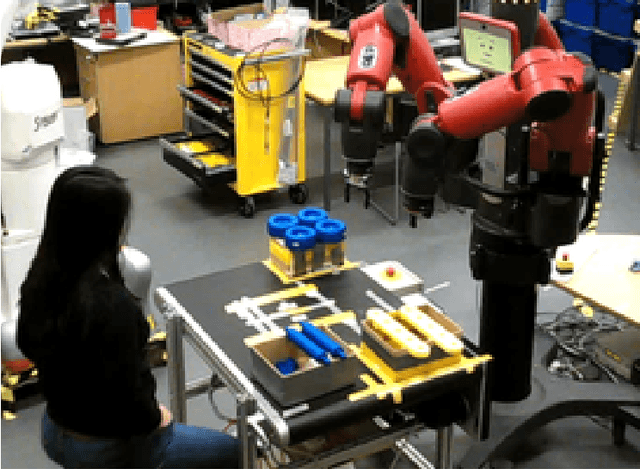
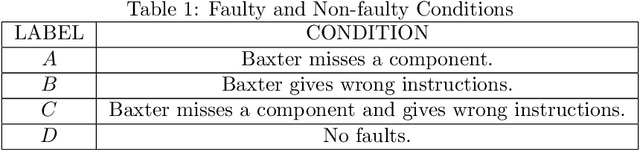
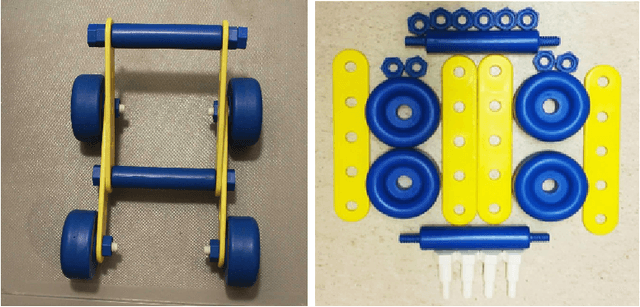
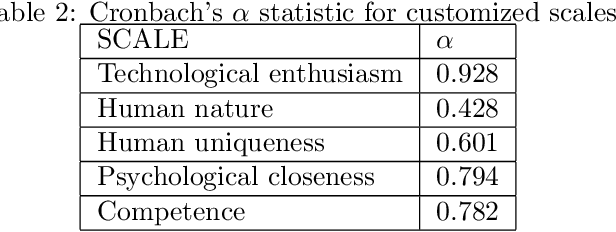
To design trustworthy robots, we need to understand the impact factors of trust: people's attitudes, experience, and characteristics; the robot's physical design, reliability, and performance; a task's specification and the circumstances under which it is to be performed, e.g. at leisure or under time pressure. As robots are used for a wide variety of tasks and applications, robot designers ought to be provided with evidence and guidance, to inform their decisions to achieve safe, trustworthy and efficient human-robot interactions. In this work, the impact factors of trust in a collaborative manufacturing scenario are studied by conducting an experiment with a real robot and participants where a physical object was assembled and then disassembled. Objective and subjective measures were employed to evaluate the development of trust, under faulty and non-faulty robot conditions, and the effect of previous experience with robots, and personality traits. Our findings highlight differences when compared to other, more social, scenarios with robotic assistants (such as a home care assistant), in that the condition (faulty or not) does not have a significant impact on the human's perception of the robot in terms of human-likeliness, likeability, trustworthiness, and even competence. However, personality and previous experience do have an effect on how the robot is perceived by participants, even though that is relatively small.
Risk-based Triggering of Bio-inspired Self-Preservation to Protect Robots from Threats
Feb 22, 2017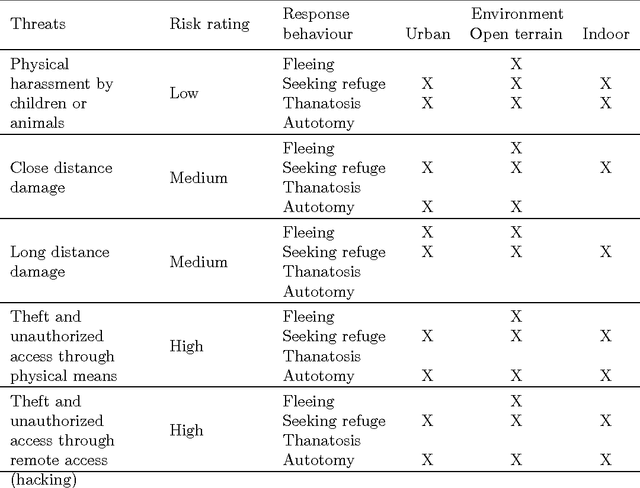
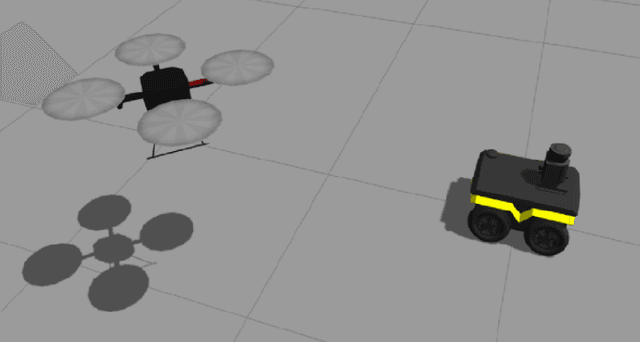
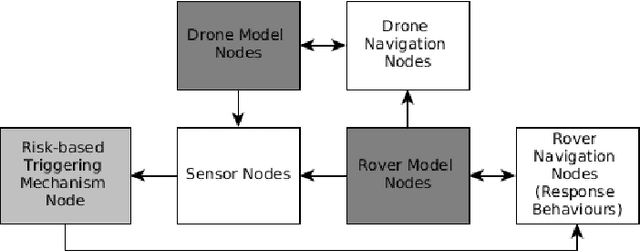
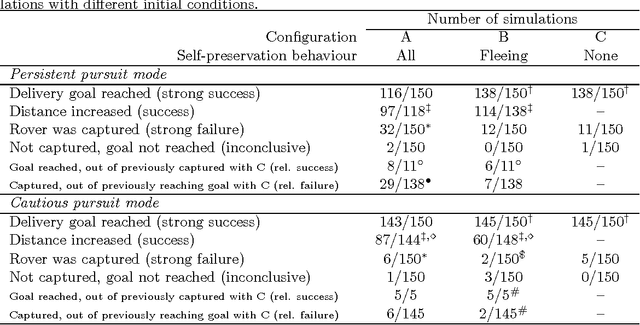
Safety in autonomous systems has been mostly studied from a human-centered perspective. Besides the loads they may carry, autonomous systems are also valuable property, and self-preservation mechanisms are needed to protect them in the presence of external threats, including malicious robots and antagonistic humans. We present a biologically inspired risk-based triggering mechanism to initiate self-preservation strategies. This mechanism considers environmental and internal system factors to measure the overall risk at any moment in time, to decide whether behaviours such as fleeing or hiding are necessary, or whether the system should continue on its task. We integrated our risk-based triggering mechanism into a delivery rover that is being attacked by a drone and evaluated its effectiveness through systematic testing in a simulated environment in Robot Operating System (ROS) and Gazebo, with a variety of different randomly generated conditions. We compared the use of the triggering mechanism and different configurations of self-preservation behaviours to not having any of these. Our results show that triggering self-preservation increases the distance between the drone and the rover for many of these configurations, and, in some instances, the drone does not catch up with the rover. Our study demonstrates the benefits of embedding risk awareness and self-preservation into autonomous systems to increase their robustness, and the value of using bio-inspired engineering to find solutions in this area.
Model-based Test Generation for Robotic Software: Automata versus Belief-Desire-Intention Agents
Dec 12, 2016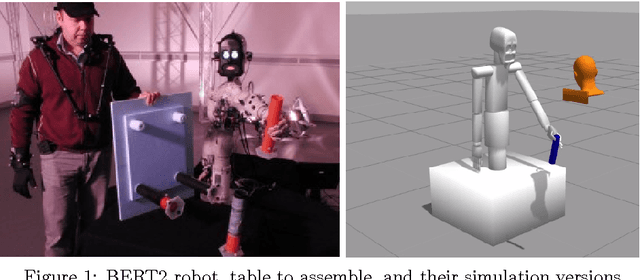
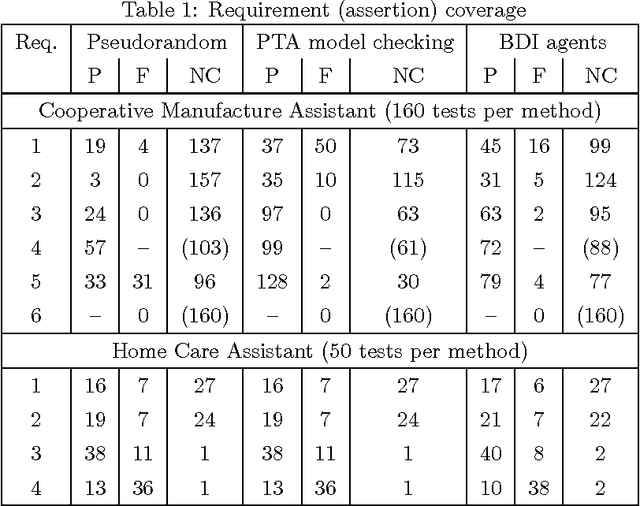
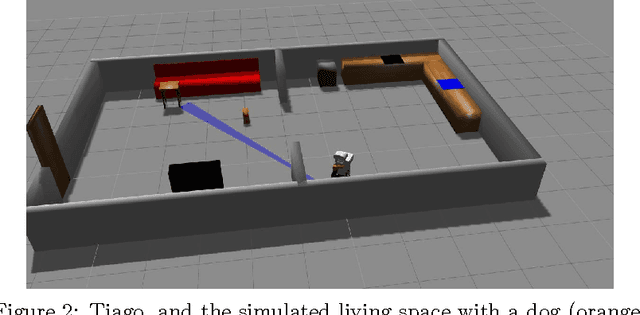
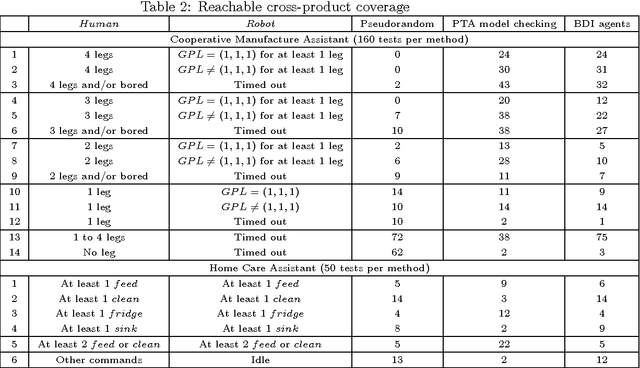
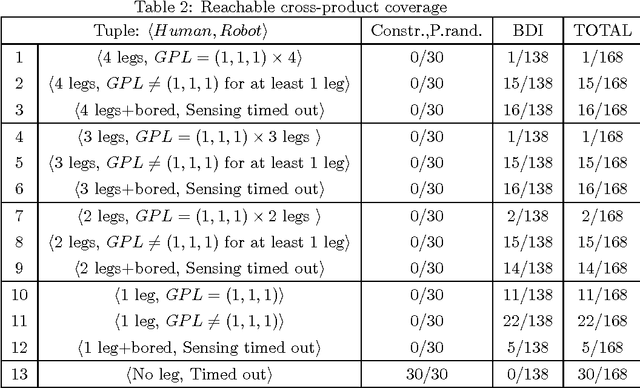
Robotic code needs to be verified to ensure its safety and functional correctness, especially when the robot is interacting with people. Testing real code in simulation is a viable option. However, generating tests that cover rare scenarios, as well as exercising most of the code, is a challenge amplified by the complexity of the interactions between the environment and the software. Model-based test generation methods can automate otherwise manual processes and facilitate reaching rare scenarios during testing. In this paper, we compare using Belief-Desire-Intention (BDI) agents as models for test generation with more conventional automata-based techniques that exploit model checking, in terms of practicality, performance, transferability to different scenarios, and exploration (`coverage'), through two case studies: a cooperative manufacturing task, and a home care scenario. The results highlight the advantages of using BDI agents for test generation. BDI agents naturally emulate the agency present in Human-Robot Interactions (HRIs), and are thus more expressive than automata. The performance of the BDI-based test generation is at least as high, and the achieved coverage is higher or equivalent, compared to test generation based on model checking automata.
Formal Specification and Analysis of Autonomous Systems under Partial Compliance
Jul 22, 2016

The widespread adoption of autonomous systems depends on providing guarantees of safety and functional correctness, at both design time and runtime. Information about the extent to which functional requirements can be met in combination with non-functional requirements (NFRs) -- i.e. requirements that can be partially complied with -- , under dynamic and uncertain environments, provides opportunities to enhance the safety and functional correctness of systems at design time. We present a technique to formally define system attributes that can change or be changed to deal with dynamic and uncertain environments (denominated weakened specifications) as a partially ordered lattice, and to automatically explore the system under different specifications, using probabilistic model checking, to find the likelihood of satisfying a requirement. The resulting probabilities form boundaries of "optimal specifications", analogous to Pareto frontiers in multi-objective optimization, informing the designer about the system's capabilities, such as resilience or robustness, when changing its attributes to deal with dynamic and uncertain environments. We illustrate the proposed technique through a domestic robotic assistant example.
Systematic and Realistic Testing in Simulation of Control Code for Robots in Collaborative Human-Robot Interactions
Jul 13, 2016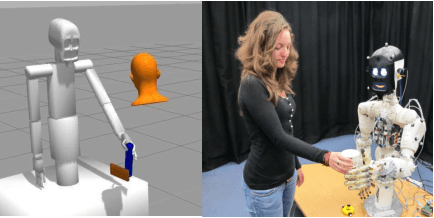
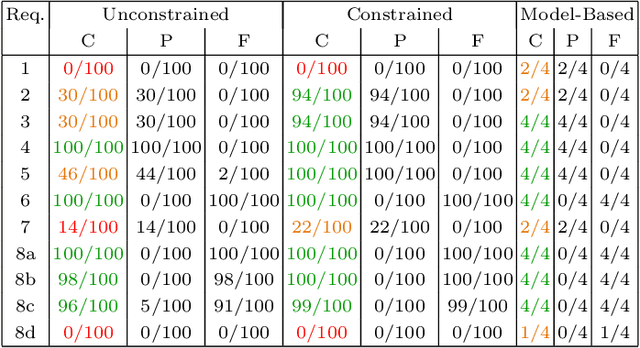
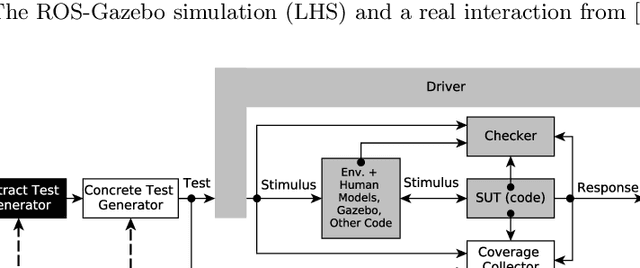
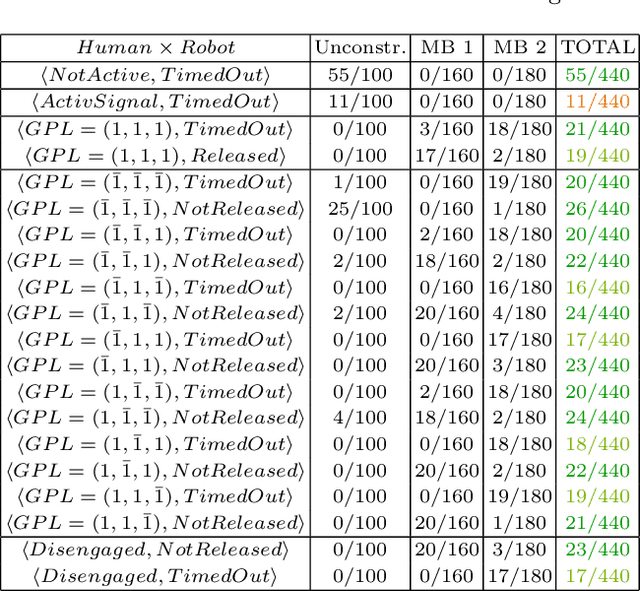
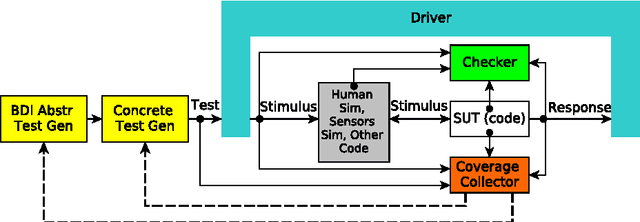
Industries such as flexible manufacturing and home care will be transformed by the presence of robotic assistants. Assurance of safety and functional soundness for these robotic systems will require rigorous verification and validation. We propose testing in simulation using Coverage-Driven Verification (CDV) to guide the testing process in an automatic and systematic way. We use a two-tiered test generation approach, where abstract test sequences are computed first and then concretized (e.g., data and variables are instantiated), to reduce the complexity of the test generation problem. To demonstrate the effectiveness of our approach, we developed a testbench for robotic code, running in ROS-Gazebo, that implements an object handover as part of a human-robot interaction (HRI) task. Tests are generated to stimulate the robot's code in a realistic manner, through stimulating the human, environment, sensors, and actuators in simulation. We compare the merits of unconstrained, constrained and model-based test generation in achieving thorough exploration of the code under test, and interesting combinations of human-robot interactions. Our results show that CDV combined with systematic test generation achieves a very high degree of automation in simulation-based verification of control code for robots in HRI.
Intelligent Agent-Based Stimulation for Testing Robotic Software in Human-Robot Interactions
Jul 13, 2016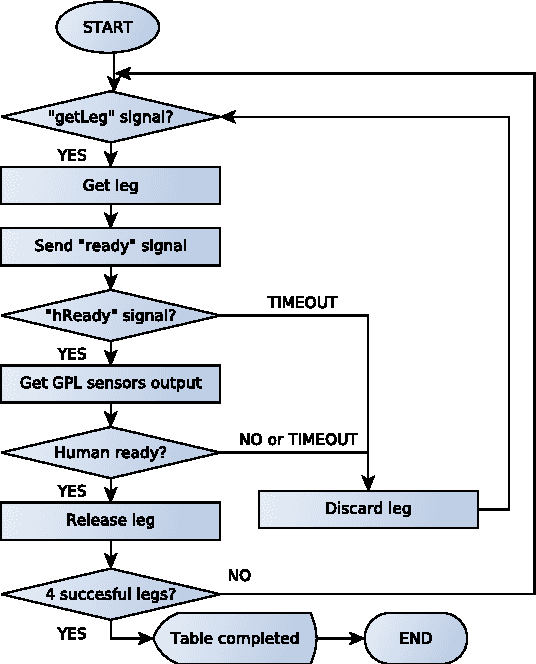


The challenges of robotic software testing extend beyond conventional software testing. Valid, realistic and interesting tests need to be generated for multiple programs and hardware running concurrently, deployed into dynamic environments with people. We investigate the use of Belief-Desire-Intention (BDI) agents as models for test generation, in the domain of human-robot interaction (HRI) in simulations. These models provide rational agency, causality, and a reasoning mechanism for planning, which emulate both intelligent and adaptive robots, as well as smart testing environments directed by humans. We introduce reinforcement learning (RL) to automate the exploration of the BDI models using a reward function based on coverage feedback. Our approach is evaluated using a collaborative manufacture example, where the robotic software under test is stimulated indirectly via a simulated human co-worker. We conclude that BDI agents provide intuitive models for test generation in the HRI domain. Our results demonstrate that RL can fully automate BDI model exploration, leading to very effective coverage-directed test generation.
Believing in BERT: Using expressive communication to enhance trust and counteract operational error in physical Human-Robot Interaction
Jun 22, 2016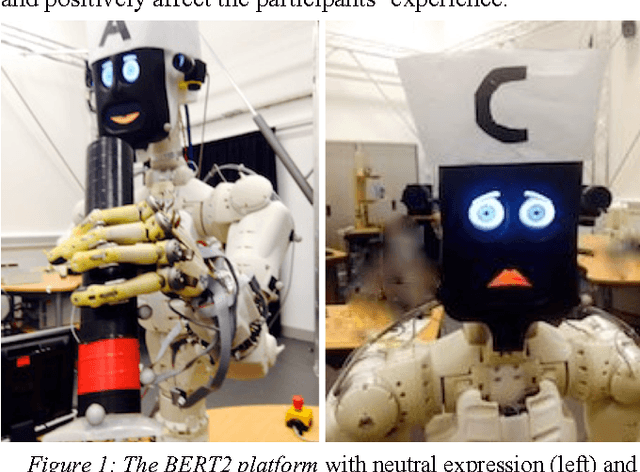
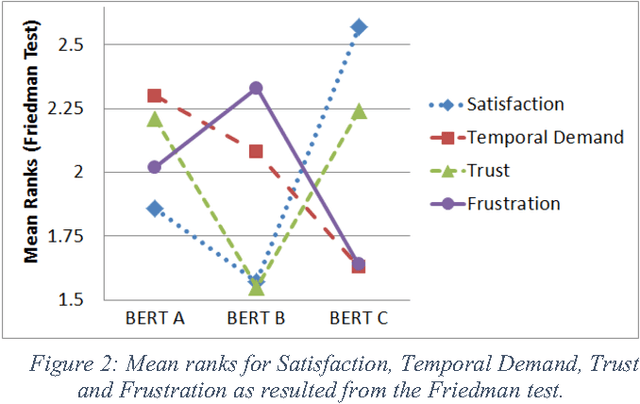
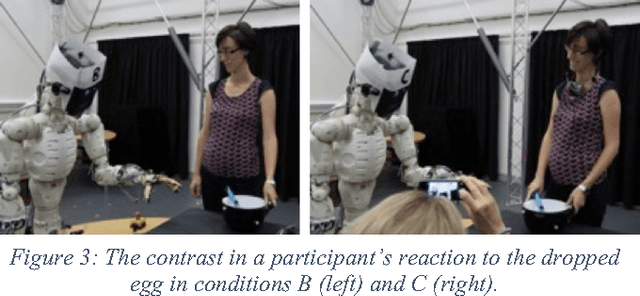
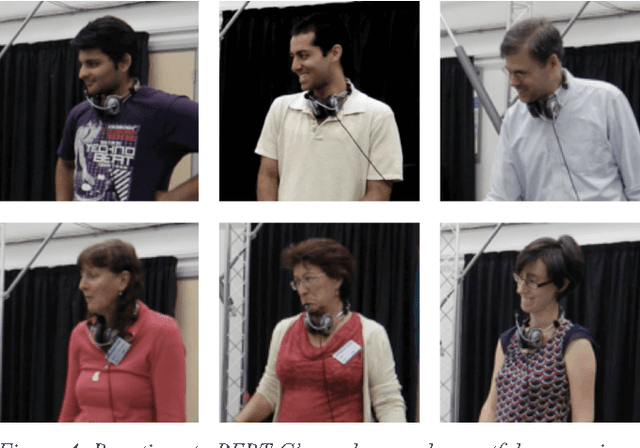
Strategies are necessary to mitigate the impact of unexpected behavior in collaborative robotics, and research to develop solutions is lacking. Our aim here was to explore the benefits of an affective interaction, as opposed to a more efficient, less error prone but non-communicative one. The experiment took the form of an omelet-making task, with a wide range of participants interacting directly with BERT2, a humanoid robot assistant. Having significant implications for design, results suggest that efficiency is not the most important aspect of performance for users; a personable, expressive robot was found to be preferable over a more efficient one, despite a considerable trade off in time taken to perform the task. Our findings also suggest that a robot exhibiting human-like characteristics may make users reluctant to 'hurt its feelings'; they may even lie in order to avoid this.
Model-Based Testing, Using Belief-Desire-Intentions Agents, of Control Code for Robots in Collaborative Human-Robot Interactions
Mar 02, 2016
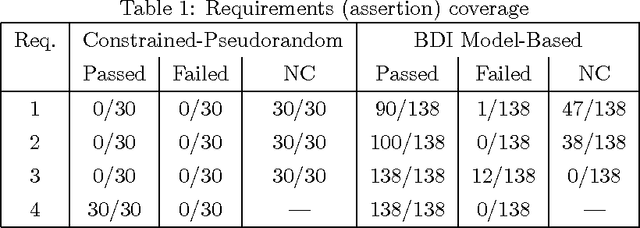
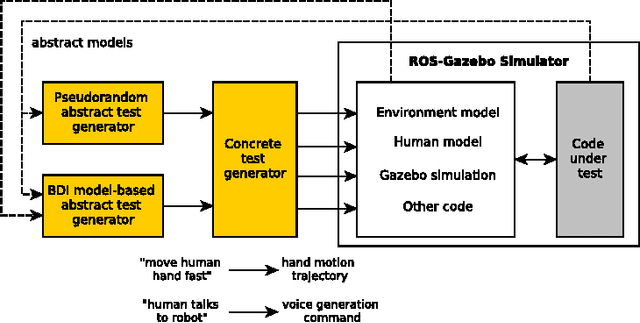
The software of robotic assistants needs to be verified, to ensure its safety and functional correctness. Testing in simulation allows a high degree of realism in the verification. However, generating tests that cover both interesting foreseen and unforeseen scenarios in human-robot interaction (HRI) tasks, while executing most of the code, remains a challenge. We propose the use of belief-desire-intention (BDI) agents in the test environment, to increase the level of realism and human-like stimulation of simulated robots. Artificial intelligence, such as agent theory, can be exploited for more intelligent test generation. An automated testbench was implemented for a simulation in Robot Operating System (ROS) and Gazebo, of a cooperative table assembly task between a humanoid robot and a person. Requirements were verified for this task, and some unexpected design issues were discovered, leading to possible code improvements. Our results highlight the practicality of BDI agents to automatically generate valid and human-like tests to get high code coverage, compared to hand-written directed tests, pseudorandom generation, and other variants of model-based test generation. Also, BDI agents allow the coverage of combined behaviours of the HRI system with more ease than writing temporal logic properties for model checking.
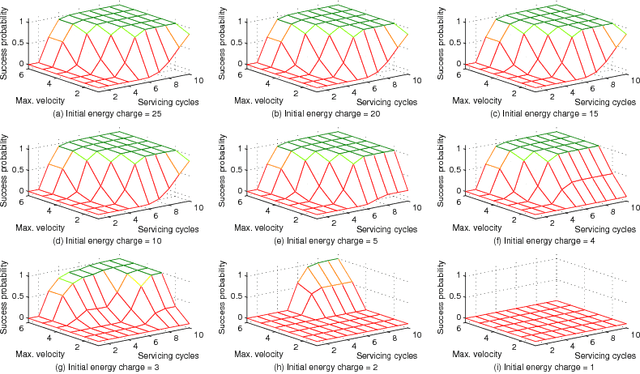
Marimba: A Tool for Verifying Properties of Hidden Markov Models
Oct 28, 2015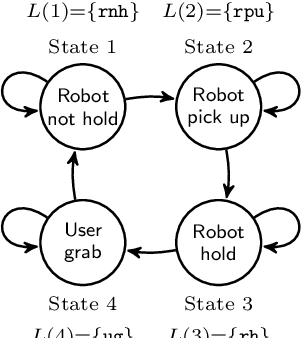
The formal verification of properties of Hidden Markov Models (HMMs) is highly desirable for gaining confidence in the correctness of the model and the corresponding system. A significant step towards HMM verification was the development by Zhang et al. of a family of logics for verifying HMMs, called POCTL*, and its model checking algorithm. As far as we know, the verification tool we present here is the first one based on Zhang et al.'s approach. As an example of its effective application, we verify properties of a handover task in the context of human-robot interaction. Our tool was implemented in Haskell, and the experimental evaluation was performed using the humanoid robot Bert2.