 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKarol Hausman
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022
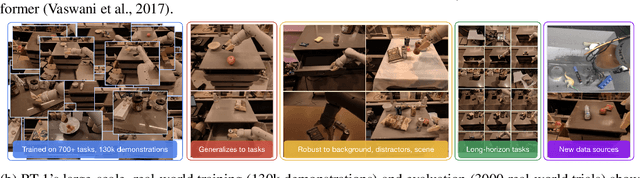

By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io
Robotic Skill Acquisition via Instruction Augmentation with Vision-Language Models
Nov 22, 2022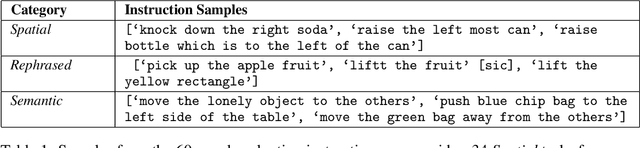
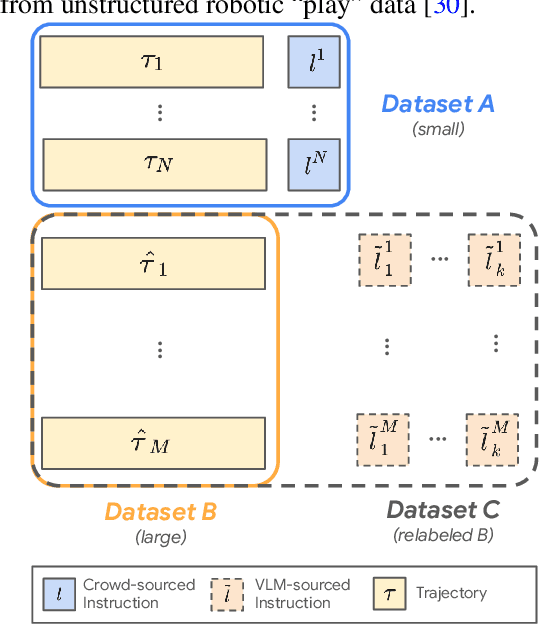
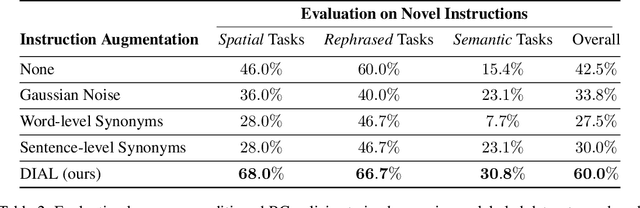
In recent years, much progress has been made in learning robotic manipulation policies that follow natural language instructions. Such methods typically learn from corpora of robot-language data that was either collected with specific tasks in mind or expensively re-labelled by humans with rich language descriptions in hindsight. Recently, large-scale pretrained vision-language models (VLMs) like CLIP or ViLD have been applied to robotics for learning representations and scene descriptors. Can these pretrained models serve as automatic labelers for robot data, effectively importing Internet-scale knowledge into existing datasets to make them useful even for tasks that are not reflected in their ground truth annotations? To accomplish this, we introduce Data-driven Instruction Augmentation for Language-conditioned control (DIAL): we utilize semi-supervised language labels leveraging the semantic understanding of CLIP to propagate knowledge onto large datasets of unlabelled demonstration data and then train language-conditioned policies on the augmented datasets. This method enables cheaper acquisition of useful language descriptions compared to expensive human labels, allowing for more efficient label coverage of large-scale datasets. We apply DIAL to a challenging real-world robotic manipulation domain where 96.5% of the 80,000 demonstrations do not contain crowd-sourced language annotations. DIAL enables imitation learning policies to acquire new capabilities and generalize to 60 novel instructions unseen in the original dataset.
Code as Policies: Language Model Programs for Embodied Control
Sep 19, 2022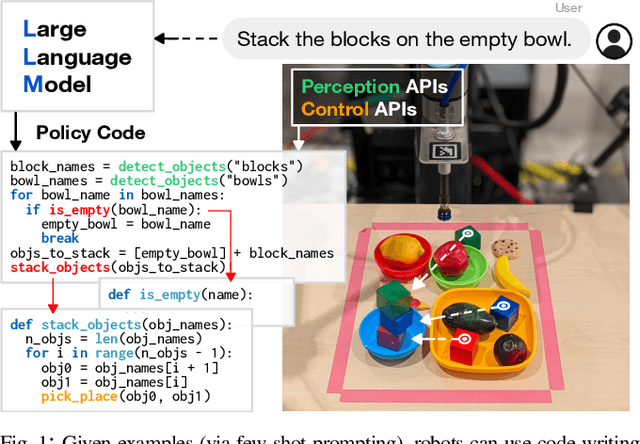
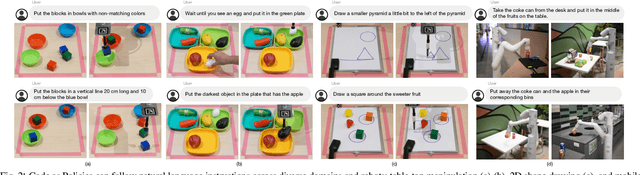
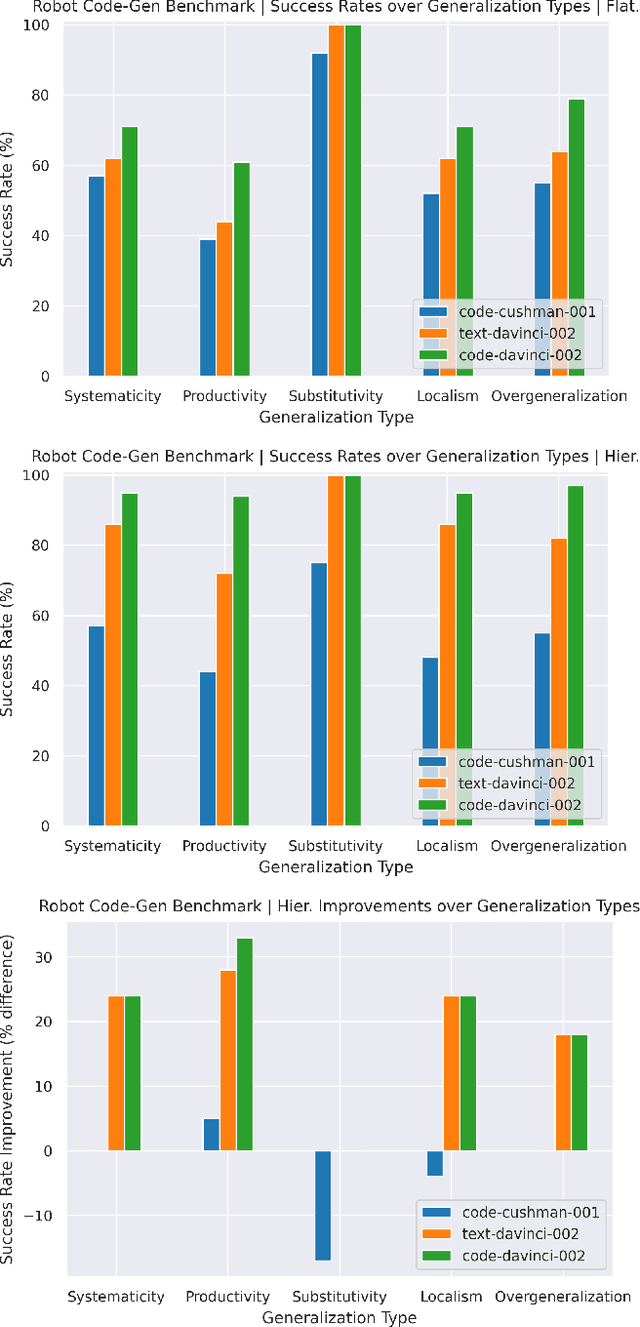
Large language models (LLMs) trained on code completion have been shown to be capable of synthesizing simple Python programs from docstrings [1]. We find that these code-writing LLMs can be re-purposed to write robot policy code, given natural language commands. Specifically, policy code can express functions or feedback loops that process perception outputs (e.g.,from object detectors [2], [3]) and parameterize control primitive APIs. When provided as input several example language commands (formatted as comments) followed by corresponding policy code (via few-shot prompting), LLMs can take in new commands and autonomously re-compose API calls to generate new policy code respectively. By chaining classic logic structures and referencing third-party libraries (e.g., NumPy, Shapely) to perform arithmetic, LLMs used in this way can write robot policies that (i) exhibit spatial-geometric reasoning, (ii) generalize to new instructions, and (iii) prescribe precise values (e.g., velocities) to ambiguous descriptions ("faster") depending on context (i.e., behavioral commonsense). This paper presents code as policies: a robot-centric formalization of language model generated programs (LMPs) that can represent reactive policies (e.g., impedance controllers), as well as waypoint-based policies (vision-based pick and place, trajectory-based control), demonstrated across multiple real robot platforms. Central to our approach is prompting hierarchical code-gen (recursively defining undefined functions), which can write more complex code and also improves state-of-the-art to solve 39.8% of problems on the HumanEval [1] benchmark. Code and videos are available at https://code-as-policies.github.io
Offline Reinforcement Learning at Multiple Frequencies
Jul 26, 2022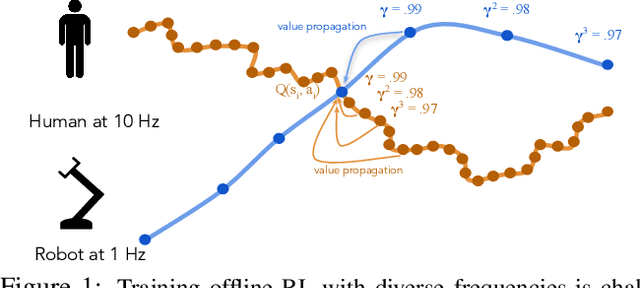
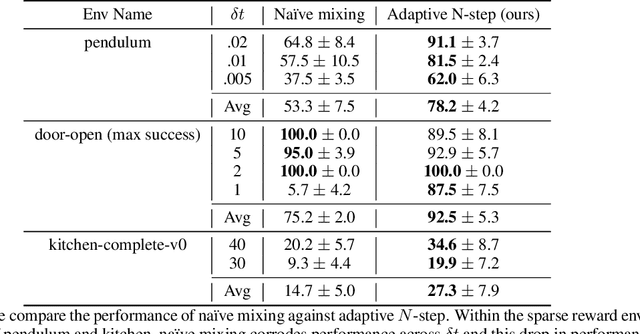

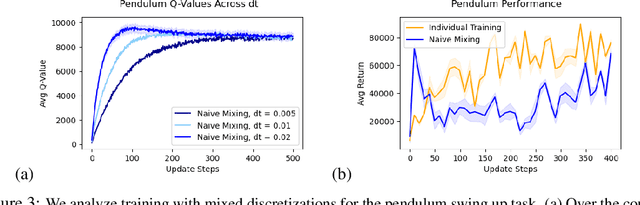
Leveraging many sources of offline robot data requires grappling with the heterogeneity of such data. In this paper, we focus on one particular aspect of heterogeneity: learning from offline data collected at different control frequencies. Across labs, the discretization of controllers, sampling rates of sensors, and demands of a task of interest may differ, giving rise to a mixture of frequencies in an aggregated dataset. We study how well offline reinforcement learning (RL) algorithms can accommodate data with a mixture of frequencies during training. We observe that the $Q$-value propagates at different rates for different discretizations, leading to a number of learning challenges for off-the-shelf offline RL. We present a simple yet effective solution that enforces consistency in the rate of $Q$-value updates to stabilize learning. By scaling the value of $N$ in $N$-step returns with the discretization size, we effectively balance $Q$-value propagation, leading to more stable convergence. On three simulated robotic control problems, we empirically find that this simple approach outperforms na\"ive mixing by 50% on average.
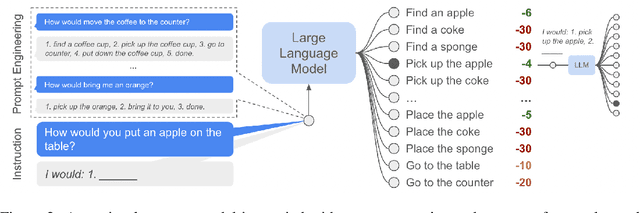
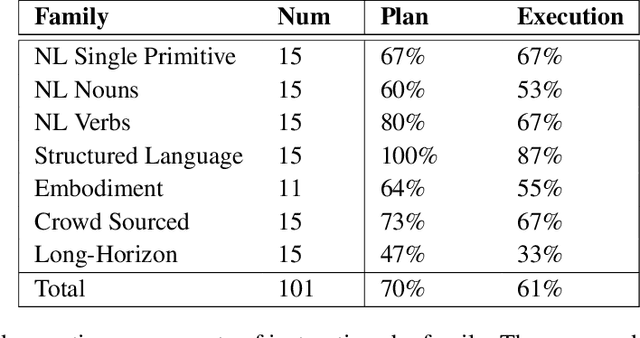
Inner Monologue: Embodied Reasoning through Planning with Language Models
Jul 12, 2022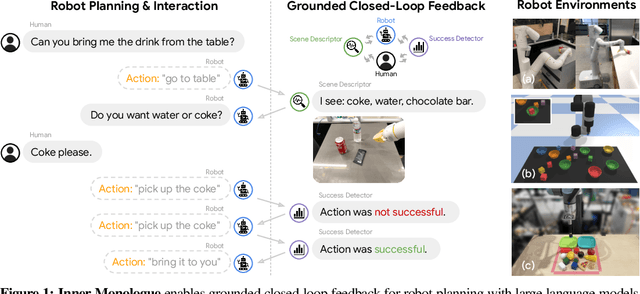
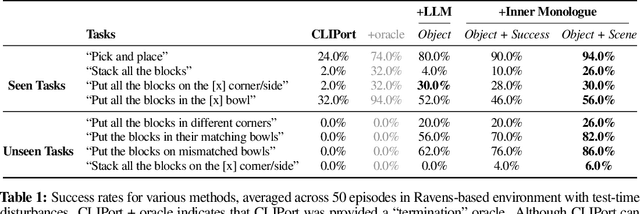
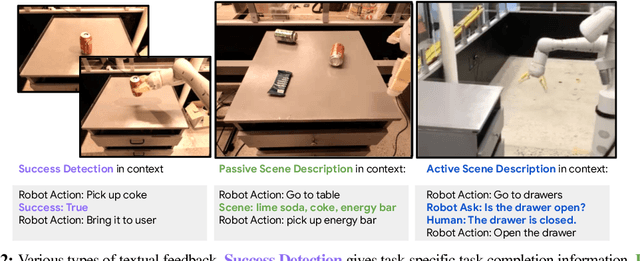
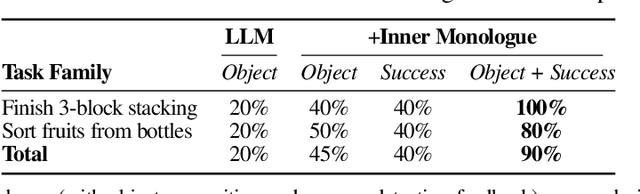
Recent works have shown how the reasoning capabilities of Large Language Models (LLMs) can be applied to domains beyond natural language processing, such as planning and interaction for robots. These embodied problems require an agent to understand many semantic aspects of the world: the repertoire of skills available, how these skills influence the world, and how changes to the world map back to the language. LLMs planning in embodied environments need to consider not just what skills to do, but also how and when to do them - answers that change over time in response to the agent's own choices. In this work, we investigate to what extent LLMs used in such embodied contexts can reason over sources of feedback provided through natural language, without any additional training. We propose that by leveraging environment feedback, LLMs are able to form an inner monologue that allows them to more richly process and plan in robotic control scenarios. We investigate a variety of sources of feedback, such as success detection, scene description, and human interaction. We find that closed-loop language feedback significantly improves high-level instruction completion on three domains, including simulated and real table top rearrangement tasks and long-horizon mobile manipulation tasks in a kitchen environment in the real world.
Jump-Start Reinforcement Learning
Apr 05, 2022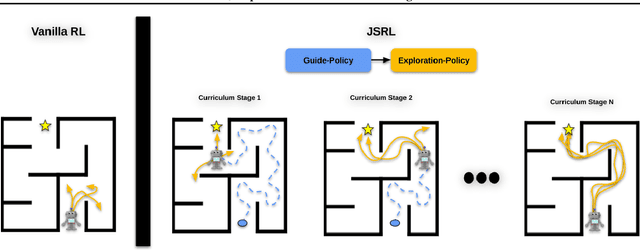
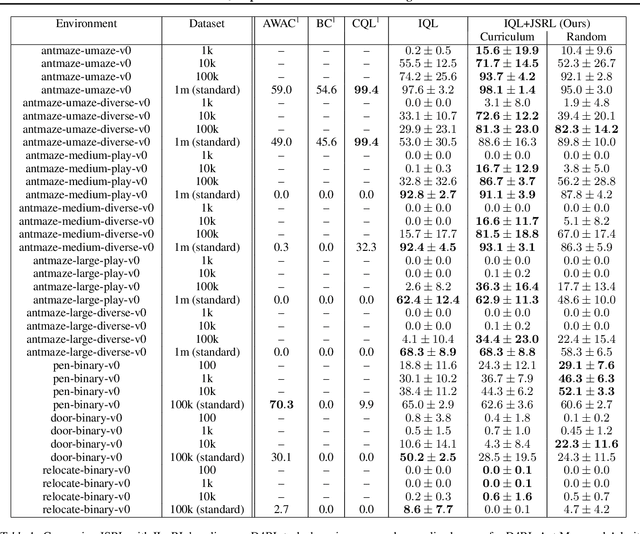
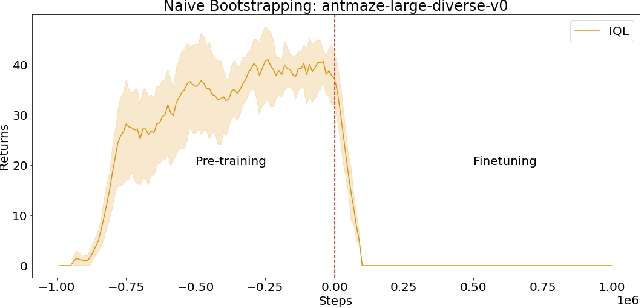
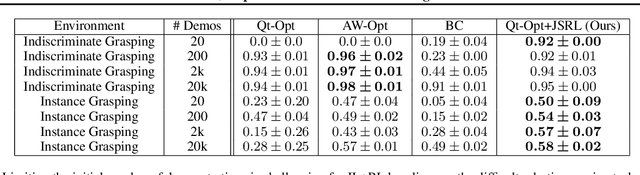
Reinforcement learning (RL) provides a theoretical framework for continuously improving an agent's behavior via trial and error. However, efficiently learning policies from scratch can be very difficult, particularly for tasks with exploration challenges. In such settings, it might be desirable to initialize RL with an existing policy, offline data, or demonstrations. However, naively performing such initialization in RL often works poorly, especially for value-based methods. In this paper, we present a meta algorithm that can use offline data, demonstrations, or a pre-existing policy to initialize an RL policy, and is compatible with any RL approach. In particular, we propose Jump-Start Reinforcement Learning (JSRL), an algorithm that employs two policies to solve tasks: a guide-policy, and an exploration-policy. By using the guide-policy to form a curriculum of starting states for the exploration-policy, we are able to efficiently improve performance on a set of simulated robotic tasks. We show via experiments that JSRL is able to significantly outperform existing imitation and reinforcement learning algorithms, particularly in the small-data regime. In addition, we provide an upper bound on the sample complexity of JSRL and show that with the help of a guide-policy, one can improve the sample complexity for non-optimism exploration methods from exponential in horizon to polynomial.
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Apr 04, 2022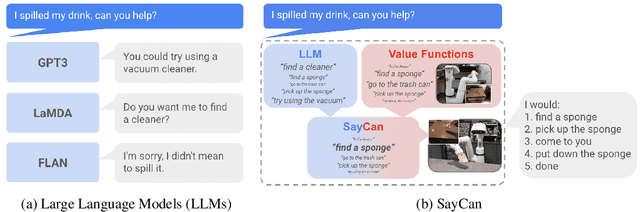
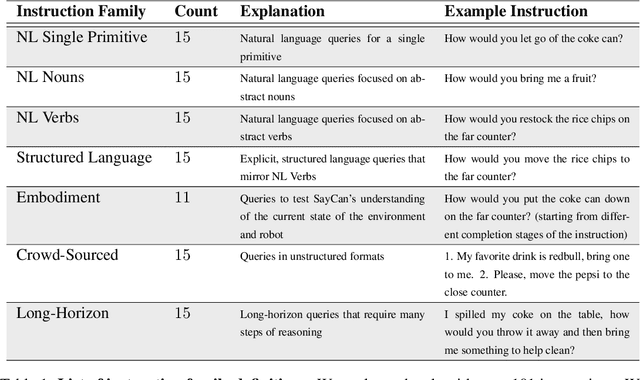
Large language models can encode a wealth of semantic knowledge about the world. Such knowledge could be extremely useful to robots aiming to act upon high-level, temporally extended instructions expressed in natural language. However, a significant weakness of language models is that they lack real-world experience, which makes it difficult to leverage them for decision making within a given embodiment. For example, asking a language model to describe how to clean a spill might result in a reasonable narrative, but it may not be applicable to a particular agent, such as a robot, that needs to perform this task in a particular environment. We propose to provide real-world grounding by means of pretrained skills, which are used to constrain the model to propose natural language actions that are both feasible and contextually appropriate. The robot can act as the language model's "hands and eyes," while the language model supplies high-level semantic knowledge about the task. We show how low-level skills can be combined with large language models so that the language model provides high-level knowledge about the procedures for performing complex and temporally-extended instructions, while value functions associated with these skills provide the grounding necessary to connect this knowledge to a particular physical environment. We evaluate our method on a number of real-world robotic tasks, where we show the need for real-world grounding and that this approach is capable of completing long-horizon, abstract, natural language instructions on a mobile manipulator. The project's website and the video can be found at https://say-can.github.io/
Demonstration-Bootstrapped Autonomous Practicing via Multi-Task Reinforcement Learning
Mar 29, 2022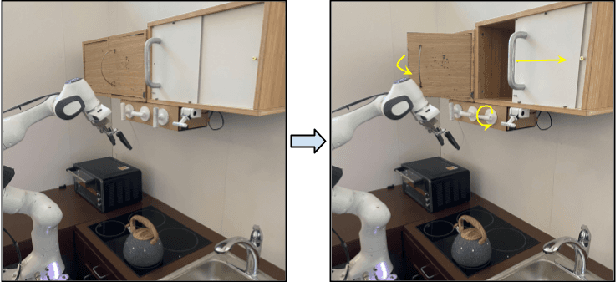
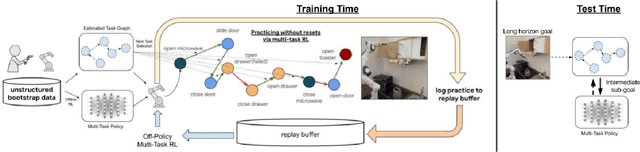
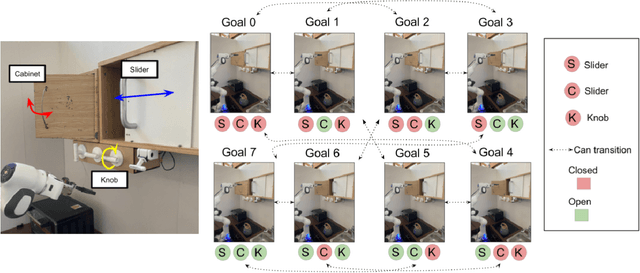
Reinforcement learning systems have the potential to enable continuous improvement in unstructured environments, leveraging data collected autonomously. However, in practice these systems require significant amounts of instrumentation or human intervention to learn in the real world. In this work, we propose a system for reinforcement learning that leverages multi-task reinforcement learning bootstrapped with prior data to enable continuous autonomous practicing, minimizing the number of resets needed while being able to learn temporally extended behaviors. We show how appropriately provided prior data can help bootstrap both low-level multi-task policies and strategies for sequencing these tasks one after another to enable learning with minimal resets. This mechanism enables our robotic system to practice with minimal human intervention at training time while being able to solve long horizon tasks at test time. We show the efficacy of the proposed system on a challenging kitchen manipulation task both in simulation and in the real world, demonstrating the ability to practice autonomously in order to solve temporally extended problems.
How to Leverage Unlabeled Data in Offline Reinforcement Learning
Feb 03, 2022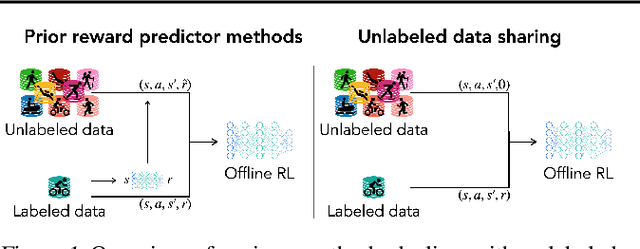
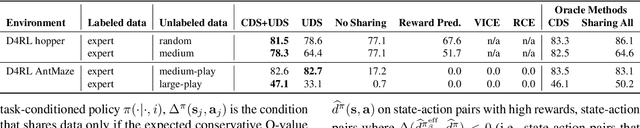

Offline reinforcement learning (RL) can learn control policies from static datasets but, like standard RL methods, it requires reward annotations for every transition. In many cases, labeling large datasets with rewards may be costly, especially if those rewards must be provided by human labelers, while collecting diverse unlabeled data might be comparatively inexpensive. How can we best leverage such unlabeled data in offline RL? One natural solution is to learn a reward function from the labeled data and use it to label the unlabeled data. In this paper, we find that, perhaps surprisingly, a much simpler method that simply applies zero rewards to unlabeled data leads to effective data sharing both in theory and in practice, without learning any reward model at all. While this approach might seem strange (and incorrect) at first, we provide extensive theoretical and empirical analysis that illustrates how it trades off reward bias, sample complexity and distributional shift, often leading to good results. We characterize conditions under which this simple strategy is effective, and further show that extending it with a simple reweighting approach can further alleviate the bias introduced by using incorrect reward labels. Our empirical evaluation confirms these findings in simulated robotic locomotion, navigation, and manipulation settings.