 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJuan Nieto
Aerial Picking and Delivery of Magnetic Objects with MAVs
Dec 08, 2016
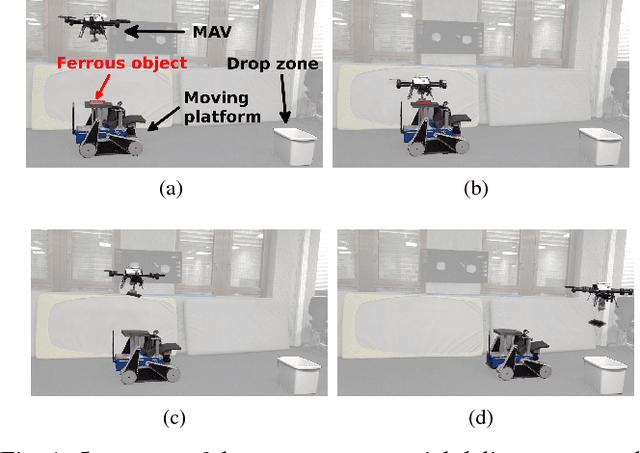
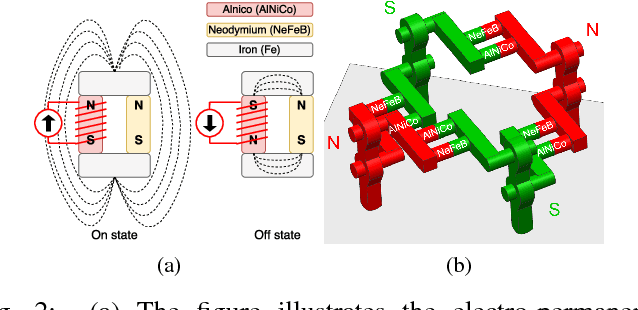
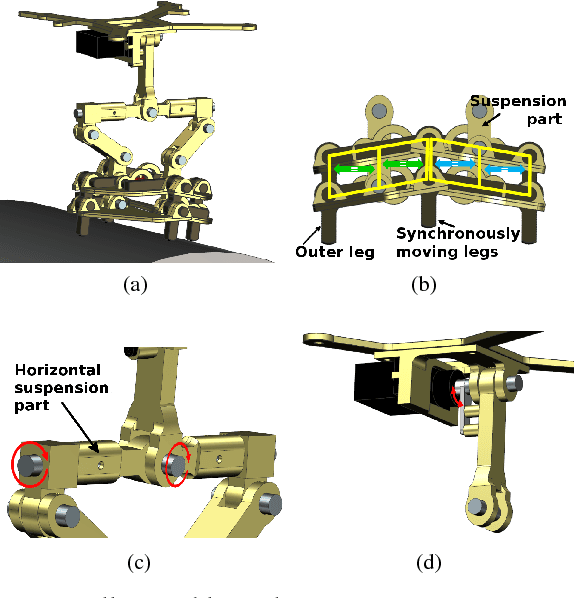
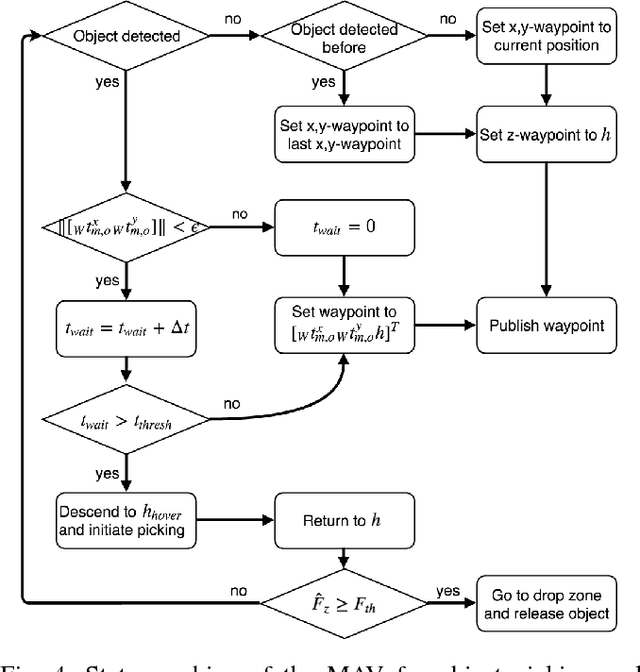
Autonomous delivery of goods using a MAV is a difficult problem, as it poses high demand on the MAV's control, perception and manipulation capabilities. This problem is especially challenging if the exact shape, location and configuration of the objects are unknown. In this paper, we report our findings during the development and evaluation of a fully integrated system that is energy efficient and enables MAVs to pick up and deliver objects with partly ferrous surface of varying shapes and weights. This is achieved by using a novel combination of an electro-permanent magnetic gripper with a passively compliant structure and integration with detection, control and servo positioning algorithms. The system's ability to grasp stationary and moving objects was tested, as well as its ability to cope with different shapes of the object and external disturbances. We show that such a system can be successfully deployed in scenarios where an object with partly ferrous parts needs to be gripped and placed in a predetermined location.
Online Informative Path Planning for Active Classification Using UAVs
Sep 27, 2016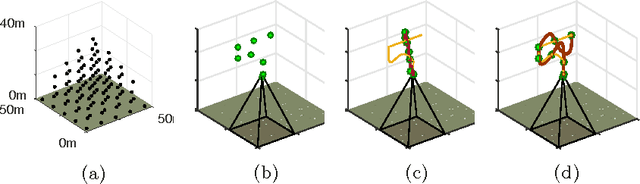
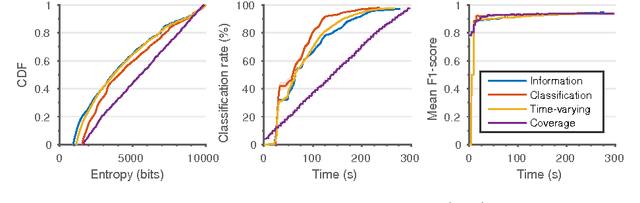
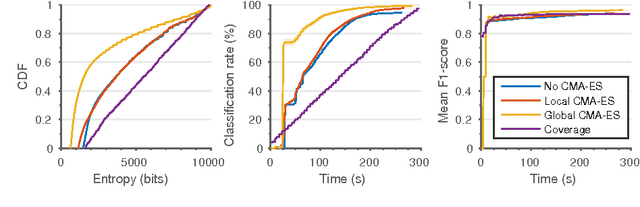
In this paper, we introduce an informative path planning (IPP) framework for active classification using unmanned aerial vehicles (UAVs). Our algorithm uses a combination of global viewpoint selection and evolutionary optimization to refine the planned trajectory in continuous 3D space while satisfying dynamic constraints. Our approach is evaluated on the application of weed detection for precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate adaptive plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We validate our approach in simulation by comparing against existing methods, and study the effects of different planning strategies. Our results show that the proposed algorithm builds maps with over 50% lower entropy compared to traditional "lawnmower" coverage in the same amount of time. We demonstrate the planning scheme on a multirotor platform with different artificial farmland set-ups.
Online Informative Path Planning for Active Classification on UAVs
Jul 13, 2016We propose an informative path planning (IPP) algorithm for active classification using an unmanned aerial vehicle (UAV), focusing on weed detection in precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We use a combination of global viewpoint selection and evolutionary optimization to refine the UAV's trajectory in continuous space while satisfying dynamic constraints. We validate our approach in simulation by comparing against standard "lawnmower" coverage, and study the effects of varying objectives and optimization strategies. We plan to evaluate our algorithm on a real platform in the immediate future.