 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJason K. Eshraghian
Neuromorphic Intermediate Representation: A Unified Instruction Set for Interoperable Brain-Inspired Computing
Nov 24, 2023
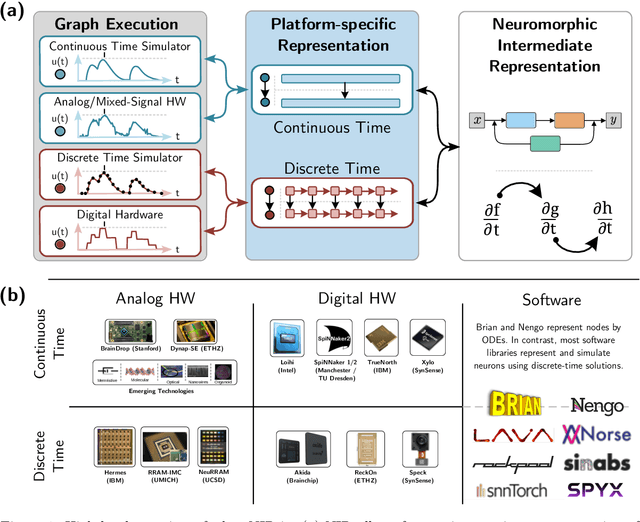

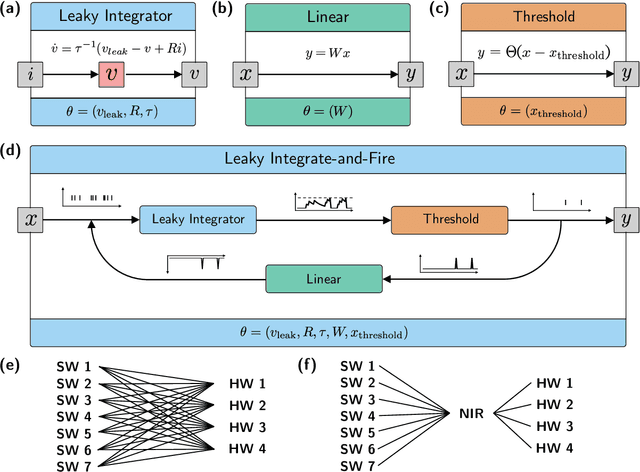
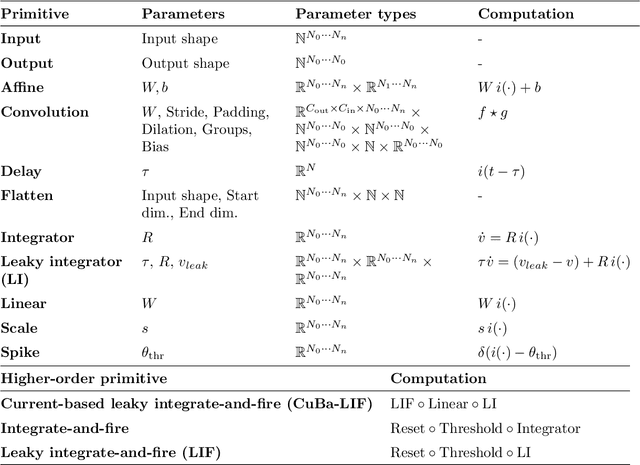
Spiking neural networks and neuromorphic hardware platforms that emulate neural dynamics are slowly gaining momentum and entering main-stream usage. Despite a well-established mathematical foundation for neural dynamics, the implementation details vary greatly across different platforms. Correspondingly, there are a plethora of software and hardware implementations with their own unique technology stacks. Consequently, neuromorphic systems typically diverge from the expected computational model, which challenges the reproducibility and reliability across platforms. Additionally, most neuromorphic hardware is limited by its access via a single software frameworks with a limited set of training procedures. Here, we establish a common reference-frame for computations in neuromorphic systems, dubbed the Neuromorphic Intermediate Representation (NIR). NIR defines a set of computational primitives as idealized continuous-time hybrid systems that can be composed into graphs and mapped to and from various neuromorphic technology stacks. By abstracting away assumptions around discretization and hardware constraints, NIR faithfully captures the fundamental computation, while simultaneously exposing the exact differences between the evaluated implementation and the idealized mathematical formalism. We reproduce three NIR graphs across 7 neuromorphic simulators and 4 hardware platforms, demonstrating support for an unprecedented number of neuromorphic systems. With NIR, we decouple the evolution of neuromorphic hardware and software, ultimately increasing the interoperability between platforms and improving accessibility to neuromorphic technologies. We believe that NIR is an important step towards the continued study of brain-inspired hardware and bottom-up approaches aimed at an improved understanding of the computational underpinnings of nervous systems.
To Spike or Not To Spike: A Digital Hardware Perspective on Deep Learning Acceleration
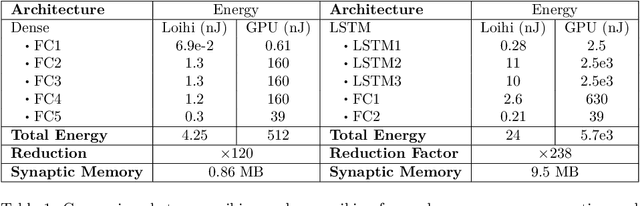
Jun 27, 2023As deep learning models scale, they become increasingly competitive from domains spanning computer vision to natural language processing; however, this happens at the expense of efficiency since they require increasingly more memory and computing power. The power efficiency of the biological brain outperforms the one of any large-scale deep learning (DL) model; thus, neuromorphic computing tries to mimic the brain operations, such as spike-based information processing, to improve the efficiency of DL models. Despite the benefits of the brain, such as efficient information transmission, dense neuronal interconnects, and the co-location of computation and memory, the available biological substrate has severely constrained the evolution of biological brains. Electronic hardware does not have the same constraints; therefore, while modeling spiking neural networks (SNNs) might uncover one piece of the puzzle, the design of efficient hardware backends for SNNs needs further investigation, potentially taking inspiration from the available work done on the artificial neural networks (ANN s) side. As such, when is it wise to look at the brain while designing new hardware, and when should it be ignored? To answer this question, we quantitatively compare the digital hardware acceleration techniques and platforms of ANN s and SNNs.
Memristive Reservoirs Learn to Learn
Jun 22, 2023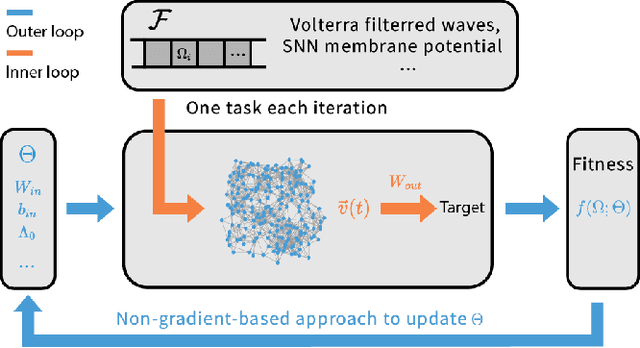
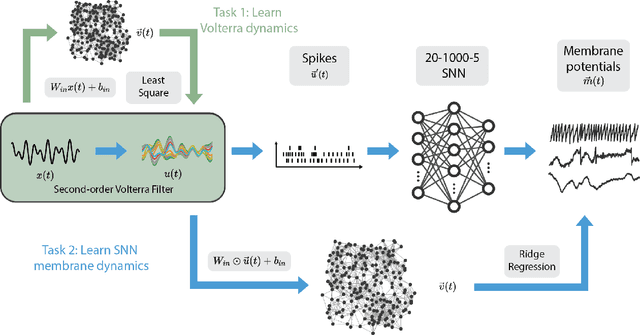
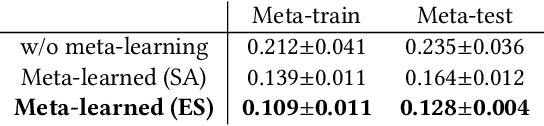
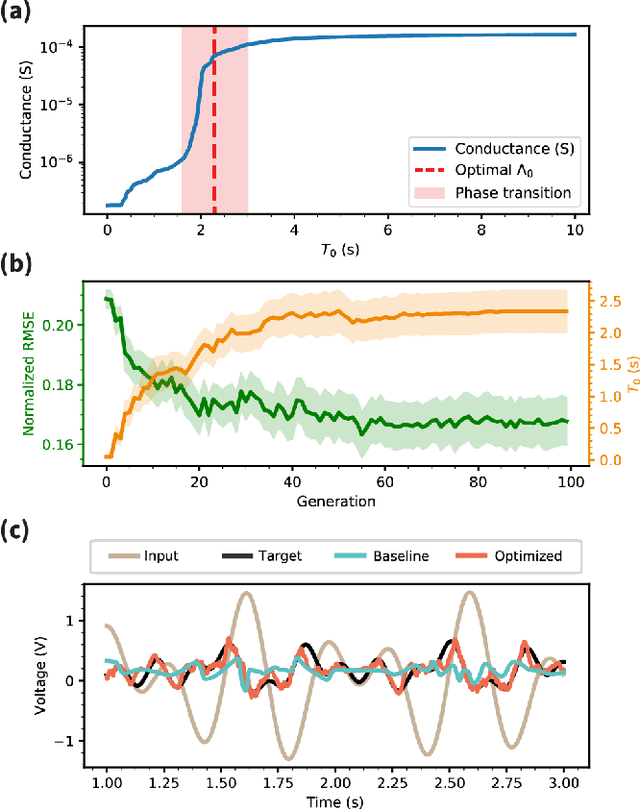
Memristive reservoirs draw inspiration from a novel class of neuromorphic hardware known as nanowire networks. These systems display emergent brain-like dynamics, with optimal performance demonstrated at dynamical phase transitions. In these networks, a limited number of electrodes are available to modulate system dynamics, in contrast to the global controllability offered by neuromorphic hardware through random access memories. We demonstrate that the learn-to-learn framework can effectively address this challenge in the context of optimization. Using the framework, we successfully identify the optimal hyperparameters for the reservoir. This finding aligns with previous research, which suggests that the optimal performance of a memristive reservoir occurs at the `edge of formation' of a conductive pathway. Furthermore, our results show that these systems can mimic membrane potential behavior observed in spiking neurons, and may serve as an interface between spike-based and continuous processes.
PowerGAN: A Machine Learning Approach for Power Side-Channel Attack on Compute-in-Memory Accelerators
Apr 13, 2023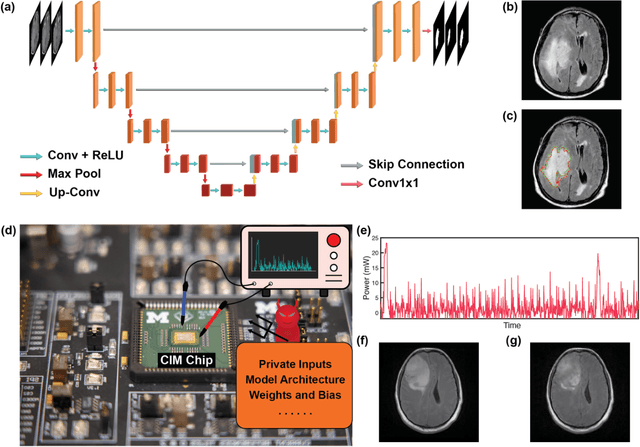
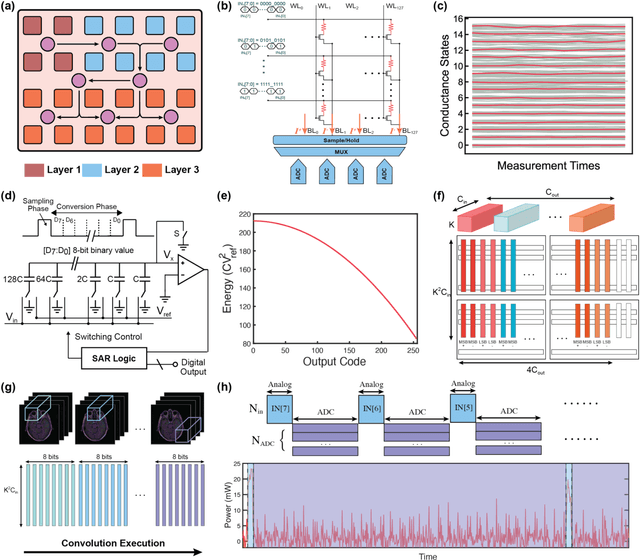
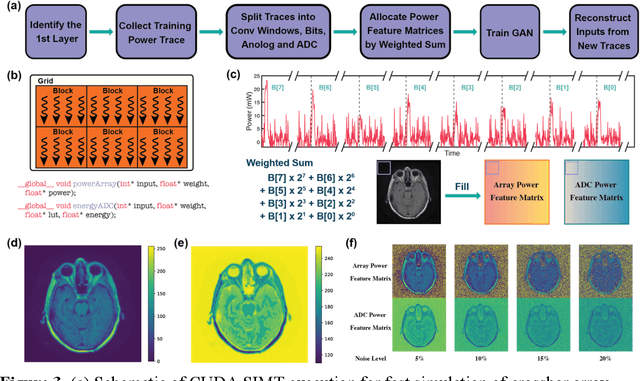
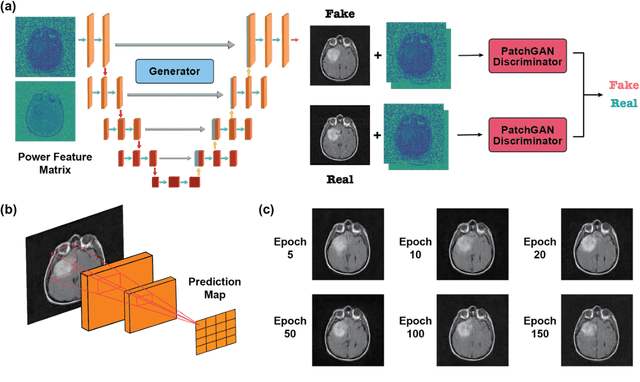
Analog compute-in-memory (CIM) accelerators are becoming increasingly popular for deep neural network (DNN) inference due to their energy efficiency and in-situ vector-matrix multiplication (VMM) capabilities. However, as the use of DNNs expands, protecting user input privacy has become increasingly important. In this paper, we identify a security vulnerability wherein an adversary can reconstruct the user's private input data from a power side-channel attack, under proper data acquisition and pre-processing, even without knowledge of the DNN model. We further demonstrate a machine learning-based attack approach using a generative adversarial network (GAN) to enhance the reconstruction. Our results show that the attack methodology is effective in reconstructing user inputs from analog CIM accelerator power leakage, even when at large noise levels and countermeasures are applied. Specifically, we demonstrate the efficacy of our approach on the U-Net for brain tumor detection in magnetic resonance imaging (MRI) medical images, with a noise-level of 20% standard deviation of the maximum power signal value. Our study highlights a significant security vulnerability in analog CIM accelerators and proposes an effective attack methodology using a GAN to breach user privacy.
SpikeGPT: Generative Pre-trained Language Model with Spiking Neural Networks
Feb 28, 2023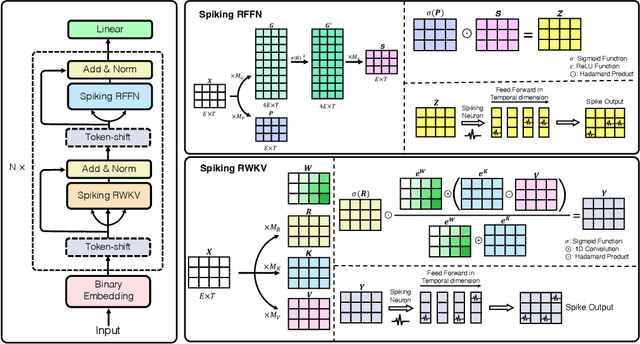
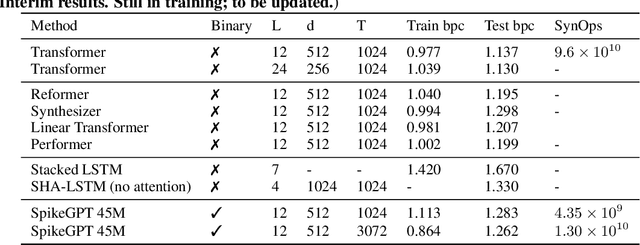
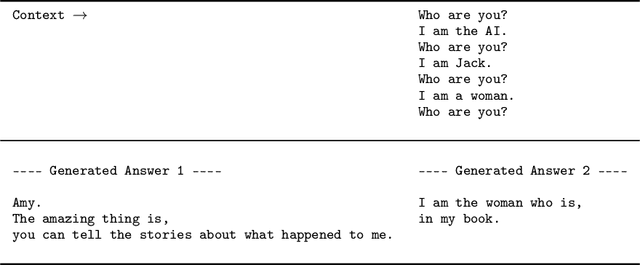
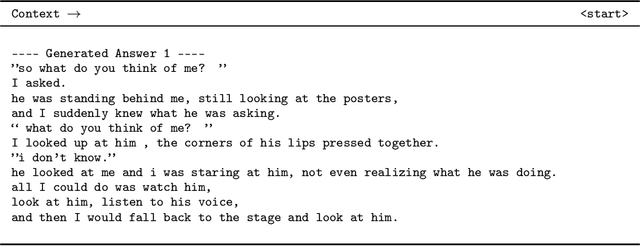
As the size of large language models continue to scale, so does the computational resources required to run it. Spiking neural networks (SNNs) have emerged as an energy-efficient approach to deep learning that leverage sparse and event-driven activations to reduce the computational overhead associated with model inference. While they have become competitive with non-spiking models on many computer vision tasks, SNNs have also proven to be more challenging to train. As a result, their performance lags behind modern deep learning, and we are yet to see the effectiveness of SNNs in language generation. In this paper, inspired by the RWKV language model, we successfully implement `SpikeGPT', a generative language model with pure binary, event-driven spiking activation units. We train the proposed model on three model variants: 45M, 125M and 260M parameters. To the best of our knowledge, this is 4x larger than any functional backprop-trained SNN to date. We achieve this by modifying the transformer block to replace multi-head self attention to reduce quadratic computational complexity to linear with increasing sequence length. Input tokens are instead streamed in sequentially to our attention mechanism (as with typical SNNs). Our preliminary experiments show that SpikeGPT remains competitive with non-spiking models on tested benchmarks, while maintaining 5x less energy consumption when processed on neuromorphic hardware that can leverage sparse, event-driven activations. Our code implementation is available at https://github.com/ridgerchu/SpikeGPT.
OpenSpike: An OpenRAM SNN Accelerator
Feb 02, 2023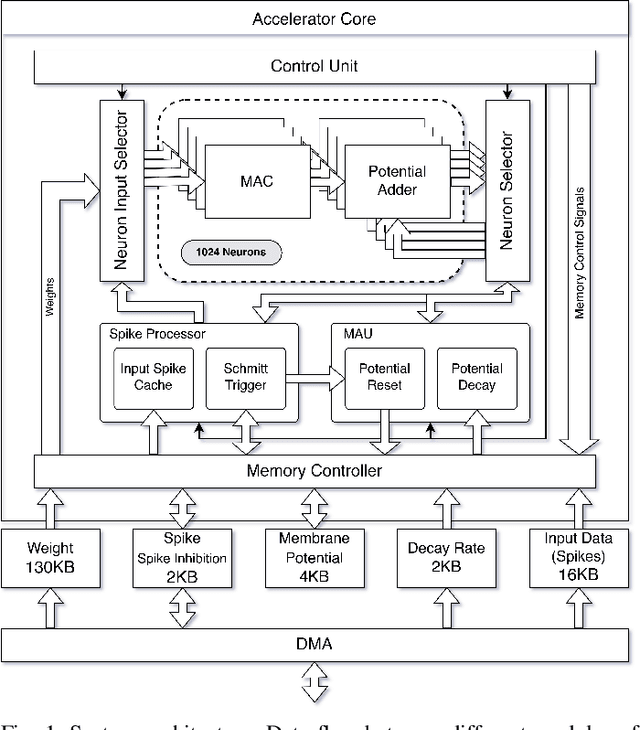
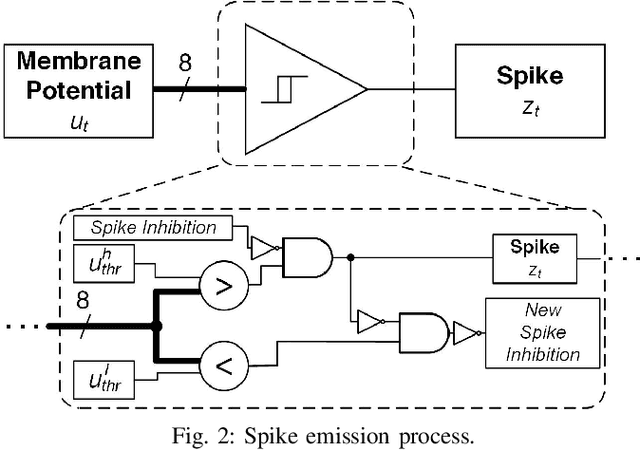
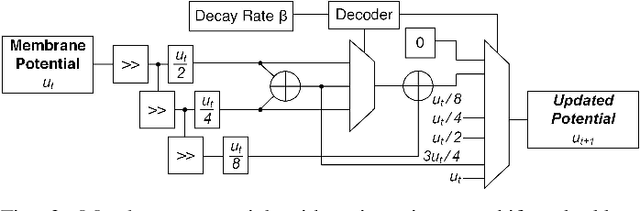
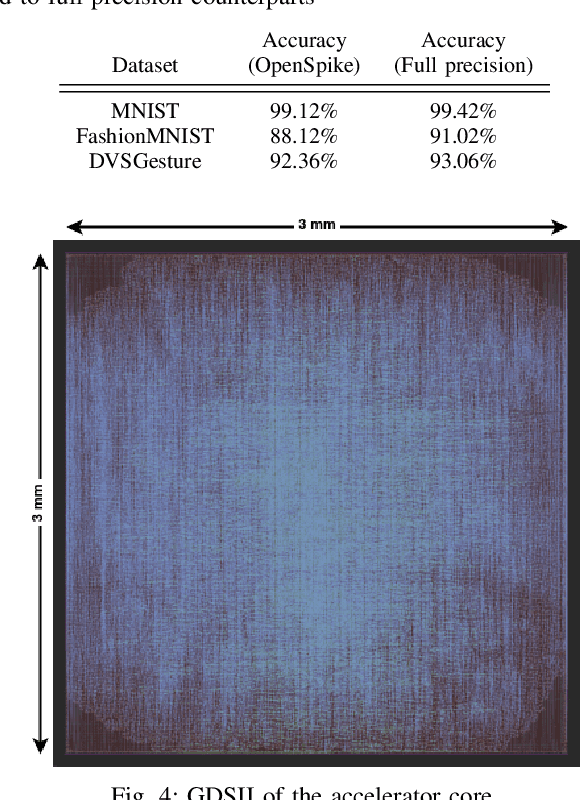
This paper presents a spiking neural network (SNN) accelerator made using fully open-source EDA tools, process design kit (PDK), and memory macros synthesized using OpenRAM. The chip is taped out in the 130 nm SkyWater process and integrates over 1 million synaptic weights, and offers a reprogrammable architecture. It operates at a clock speed of 40 MHz, a supply of 1.8 V, uses a PicoRV32 core for control, and occupies an area of 33.3 mm^2. The throughput of the accelerator is 48,262 images per second with a wallclock time of 20.72 us, at 56.8 GOPS/W. The spiking neurons use hysteresis to provide an adaptive threshold (i.e., a Schmitt trigger) which can reduce state instability. This results in high performing SNNs across a range of benchmarks that remain competitive with state-of-the-art, full precision SNNs. The design is open sourced and available online: https://github.com/sfmth/OpenSpike
Intelligence Processing Units Accelerate Neuromorphic Learning
Nov 19, 2022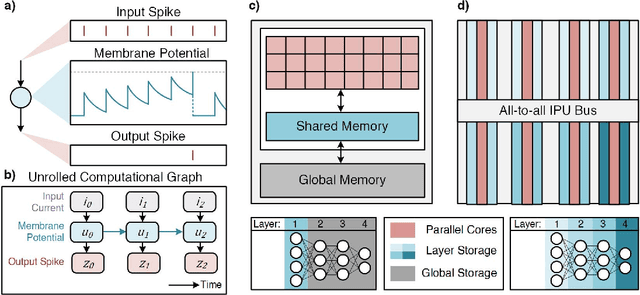
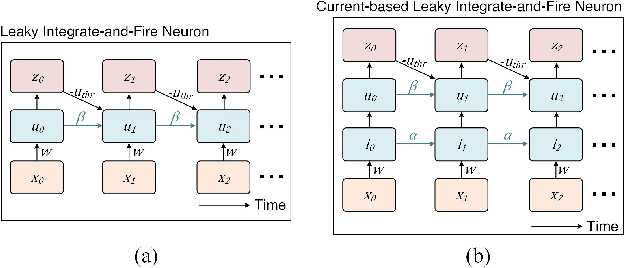
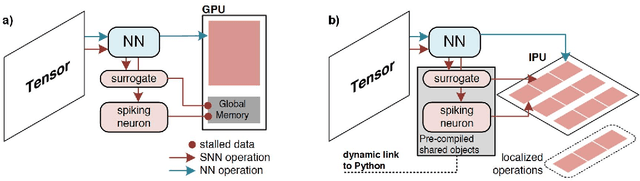
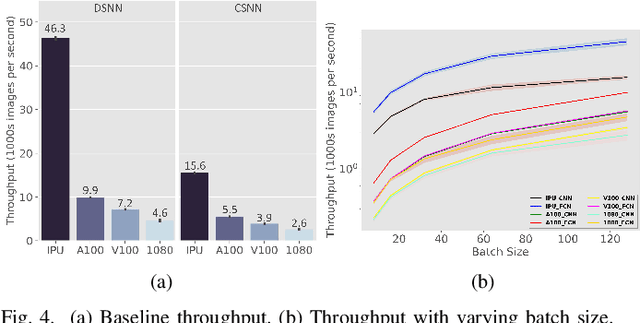
Spiking neural networks (SNNs) have achieved orders of magnitude improvement in terms of energy consumption and latency when performing inference with deep learning workloads. Error backpropagation is presently regarded as the most effective method for training SNNs, but in a twist of irony, when training on modern graphics processing units (GPUs) this becomes more expensive than non-spiking networks. The emergence of Graphcore's Intelligence Processing Units (IPUs) balances the parallelized nature of deep learning workloads with the sequential, reusable, and sparsified nature of operations prevalent when training SNNs. IPUs adopt multi-instruction multi-data (MIMD) parallelism by running individual processing threads on smaller data blocks, which is a natural fit for the sequential, non-vectorized steps required to solve spiking neuron dynamical state equations. We present an IPU-optimized release of our custom SNN Python package, snnTorch, which exploits fine-grained parallelism by utilizing low-level, pre-compiled custom operations to accelerate irregular and sparse data access patterns that are characteristic of training SNN workloads. We provide a rigorous performance assessment across a suite of commonly used spiking neuron models, and propose methods to further reduce training run-time via half-precision training. By amortizing the cost of sequential processing into vectorizable population codes, we ultimately demonstrate the potential for integrating domain-specific accelerators with the next generation of neural networks.
Spiking neural network for nonlinear regression
Oct 06, 2022
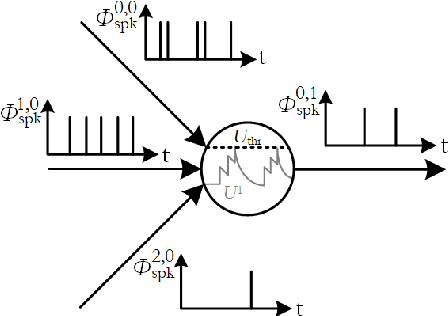
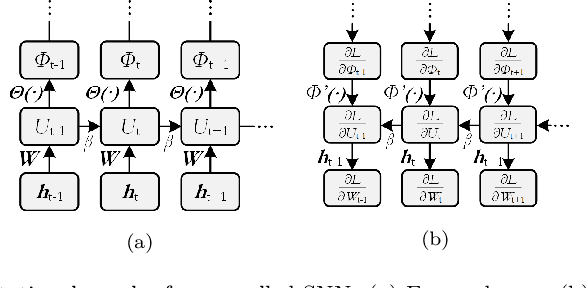
Spiking neural networks, also often referred to as the third generation of neural networks, carry the potential for a massive reduction in memory and energy consumption over traditional, second-generation neural networks. Inspired by the undisputed efficiency of the human brain, they introduce temporal and neuronal sparsity, which can be exploited by next-generation neuromorphic hardware. To open the pathway toward engineering applications, we introduce this exciting technology in the context of continuum mechanics. However, the nature of spiking neural networks poses a challenge for regression problems, which frequently arise in the modeling of engineering sciences. To overcome this problem, a framework for regression using spiking neural networks is proposed. In particular, a network topology for decoding binary spike trains to real numbers is introduced, utilizing the membrane potential of spiking neurons. As the aim of this contribution is a concise introduction to this new methodology, several different spiking neural architectures, ranging from simple spiking feed-forward to complex spiking long short-term memory neural networks, are derived. Several numerical experiments directed towards regression of linear and nonlinear, history-dependent material models are carried out. A direct comparison with counterparts of traditional neural networks shows that the proposed framework is much more efficient while retaining precision and generalizability. All code has been made publicly available in the interest of reproducibility and to promote continued enhancement in this new domain.
Gradient-based Neuromorphic Learning on Dynamical RRAM Arrays
Jun 26, 2022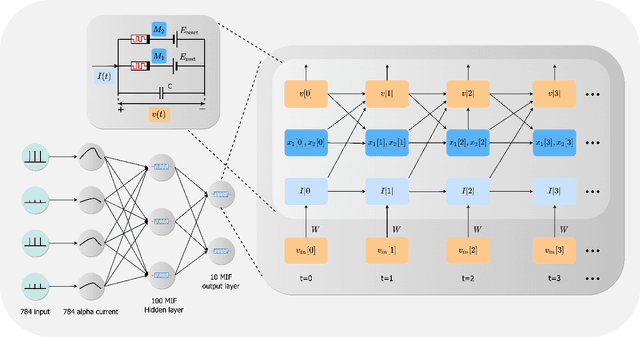
We present MEMprop, the adoption of gradient-based learning to train fully memristive spiking neural networks (MSNNs). Our approach harnesses intrinsic device dynamics to trigger naturally arising voltage spikes. These spikes emitted by memristive dynamics are analog in nature, and thus fully differentiable, which eliminates the need for surrogate gradient methods that are prevalent in the spiking neural network (SNN) literature. Memristive neural networks typically either integrate memristors as synapses that map offline-trained networks, or otherwise rely on associative learning mechanisms to train networks of memristive neurons. We instead apply the backpropagation through time (BPTT) training algorithm directly on analog SPICE models of memristive neurons and synapses. Our implementation is fully memristive, in that synaptic weights and spiking neurons are both integrated on resistive RAM (RRAM) arrays without the need for additional circuits to implement spiking dynamics, e.g., analog-to-digital converters (ADCs) or thresholded comparators. As a result, higher-order electrophysical effects are fully exploited to use the state-driven dynamics of memristive neurons at run time. By moving towards non-approximate gradient-based learning, we obtain highly competitive accuracy amongst previously reported lightweight dense fully MSNNs on several benchmarks.
A Fully Memristive Spiking Neural Network with Unsupervised Learning
Mar 10, 2022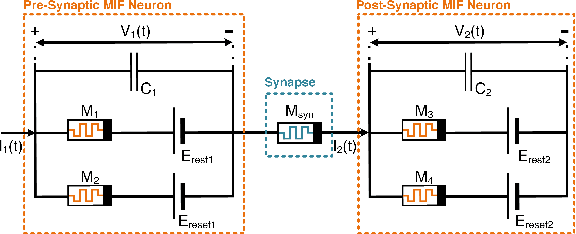
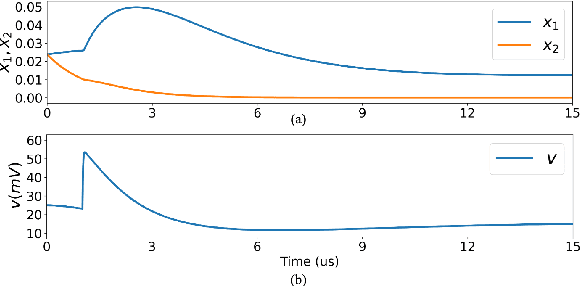
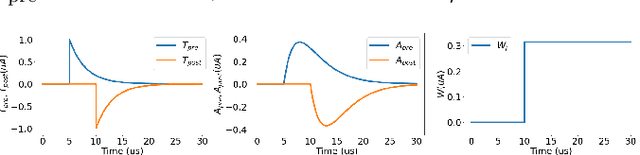
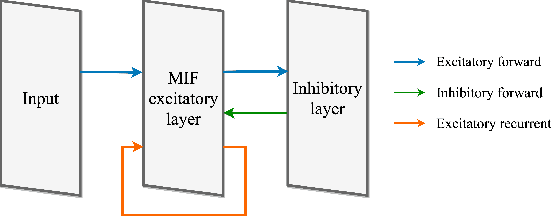
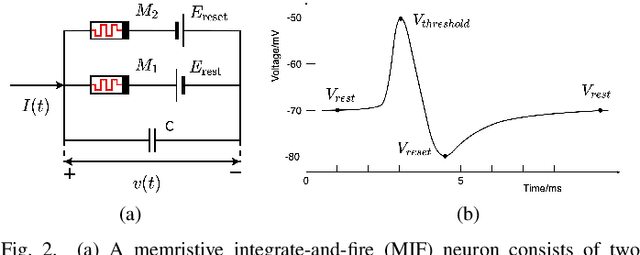
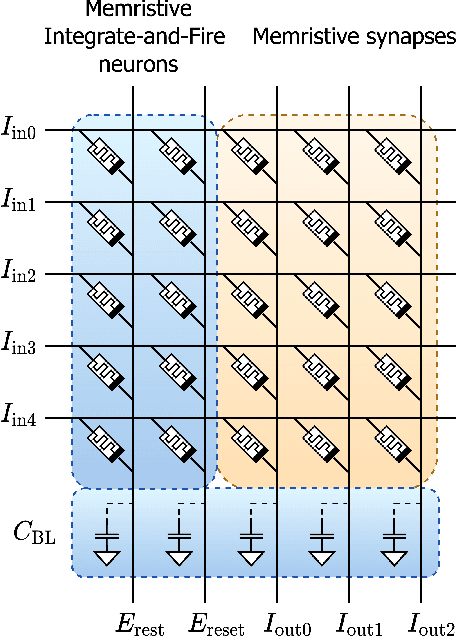
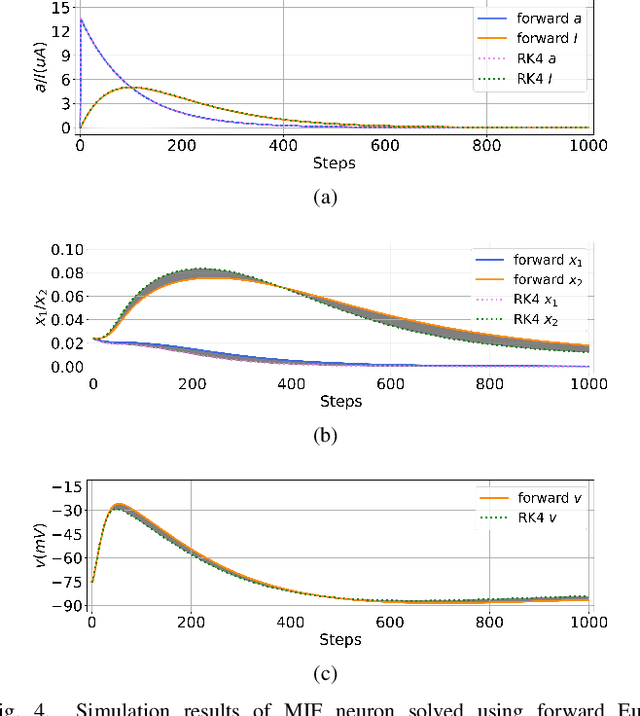
We present a fully memristive spiking neural network (MSNN) consisting of physically-realizable memristive neurons and memristive synapses to implement an unsupervised Spiking Time Dependent Plasticity (STDP) learning rule. The system is fully memristive in that both neuronal and synaptic dynamics can be realized by using memristors. The neuron is implemented using the SPICE-level memristive integrate-and-fire (MIF) model, which consists of a minimal number of circuit elements necessary to achieve distinct depolarization, hyperpolarization, and repolarization voltage waveforms. The proposed MSNN uniquely implements STDP learning by using cumulative weight changes in memristive synapses from the voltage waveform changes across the synapses, which arise from the presynaptic and postsynaptic spiking voltage signals during the training process. Two types of MSNN architectures are investigated: 1) a biologically plausible memory retrieval system, and 2) a multi-class classification system. Our circuit simulation results verify the MSNN's unsupervised learning efficacy by replicating biological memory retrieval mechanisms, and achieving 97.5% accuracy in a 4-pattern recognition problem in a large scale discriminative MSNN.