 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDanilo Jimenez Rezende
Information bottleneck through variational glasses
Dec 02, 2019
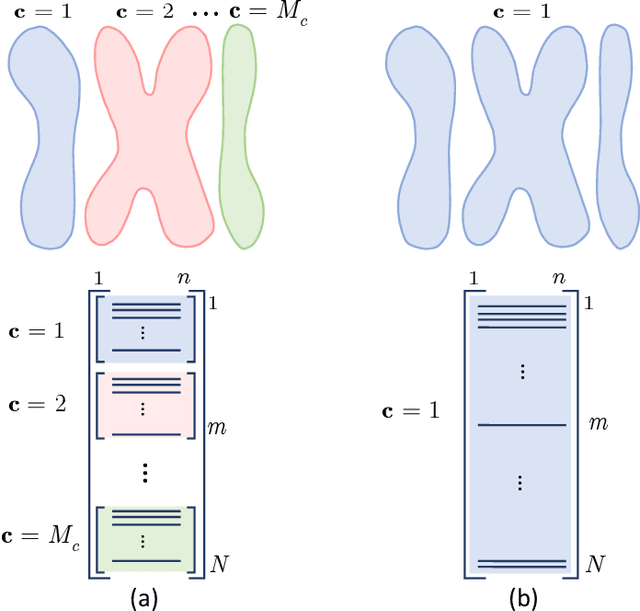
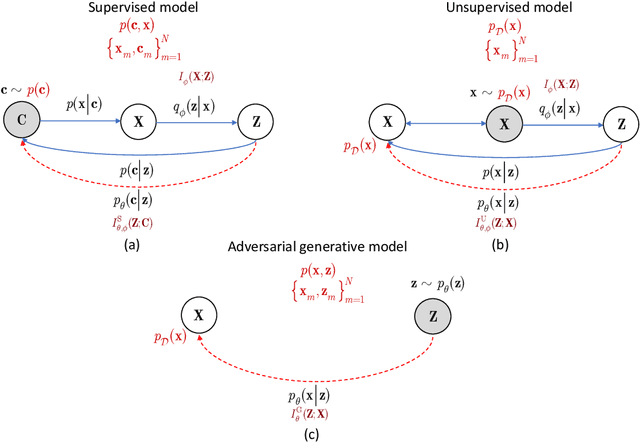
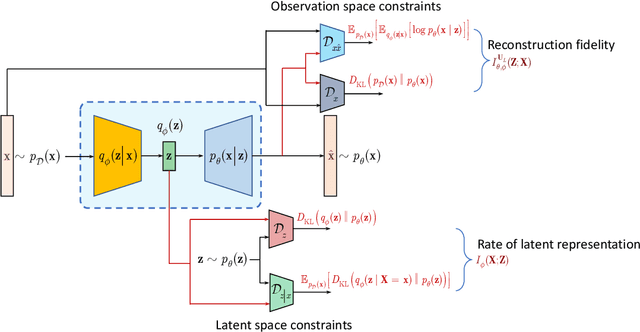
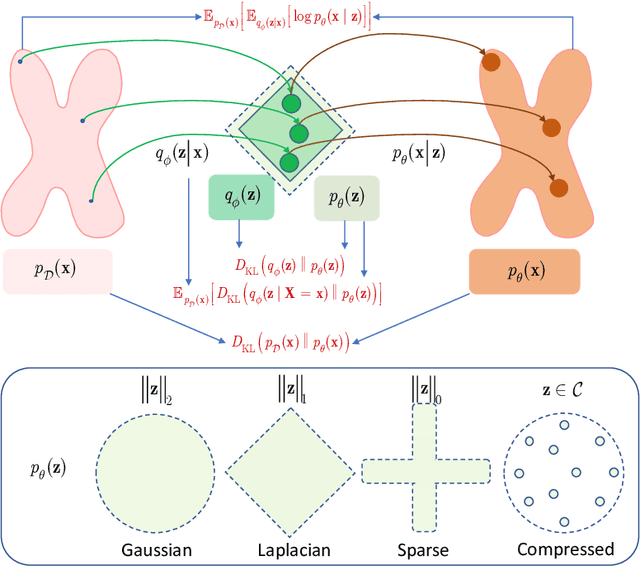
Information bottleneck (IB) principle [1] has become an important element in information-theoretic analysis of deep models. Many state-of-the-art generative models of both Variational Autoencoder (VAE) [2; 3] and Generative Adversarial Networks (GAN) [4] families use various bounds on mutual information terms to introduce certain regularization constraints [5; 6; 7; 8; 9; 10]. Accordingly, the main difference between these models consists in add regularization constraints and targeted objectives. In this work, we will consider the IB framework for three classes of models that include supervised, unsupervised and adversarial generative models. We will apply a variational decomposition leading a common structure and allowing easily establish connections between these models and analyze underlying assumptions. Based on these results, we focus our analysis on unsupervised setup and reconsider the VAE family. In particular, we present a new interpretation of VAE family based on the IB framework using a direct decomposition of mutual information terms and show some interesting connections to existing methods such as VAE [2; 3], beta-VAE [11], AAE [12], InfoVAE [5] and VAE/GAN [13]. Instead of adding regularization constraints to an evidence lower bound (ELBO) [2; 3], which itself is a lower bound, we show that many known methods can be considered as a product of variational decomposition of mutual information terms in the IB framework. The proposed decomposition might also contribute to the interpretability of generative models of both VAE and GAN families and create a new insights to a generative compression [14; 15; 16; 17]. It can also be of interest for the analysis of novelty detection based on one-class classifiers [18] with the IB based discriminators.
Hamiltonian Generative Networks
Sep 30, 2019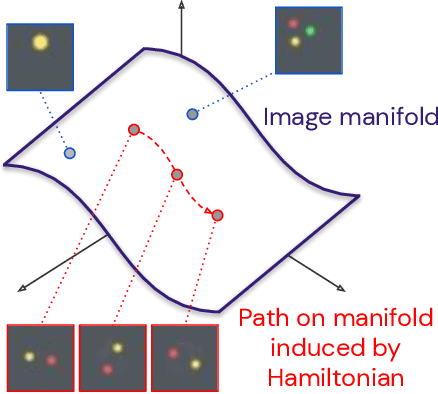

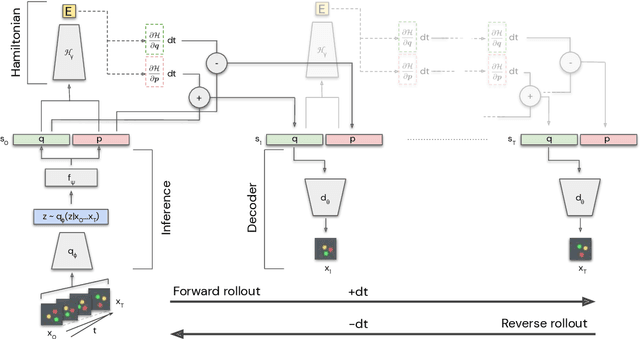

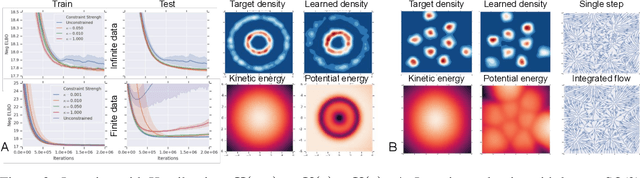
The Hamiltonian formalism plays a central role in classical and quantum physics. Hamiltonians are the main tool for modelling the continuous time evolution of systems with conserved quantities, and they come equipped with many useful properties, like time reversibility and smooth interpolation in time. These properties are important for many machine learning problems - from sequence prediction to reinforcement learning and density modelling - but are not typically provided out of the box by standard tools such as recurrent neural networks. In this paper, we introduce the Hamiltonian Generative Network (HGN), the first approach capable of consistently learning Hamiltonian dynamics from high-dimensional observations (such as images) without restrictive domain assumptions. Once trained, we can use HGN to sample new trajectories, perform rollouts both forward and backward in time and even speed up or slow down the learned dynamics. We demonstrate how a simple modification of the network architecture turns HGN into a powerful normalising flow model, called Neural Hamiltonian Flow (NHF), that uses Hamiltonian dynamics to model expressive densities. We hope that our work serves as a first practical demonstration of the value that the Hamiltonian formalism can bring to deep learning.
Equivariant Hamiltonian Flows
Sep 30, 2019
This paper introduces equivariant hamiltonian flows, a method for learning expressive densities that are invariant with respect to a known Lie-algebra of local symmetry transformations while providing an equivariant representation of the data. We provide proof of principle demonstrations of how such flows can be learnt, as well as how the addition of symmetry invariance constraints can improve data efficiency and generalisation. Finally, we make connections to disentangled representation learning and show how this work relates to a recently proposed definition.
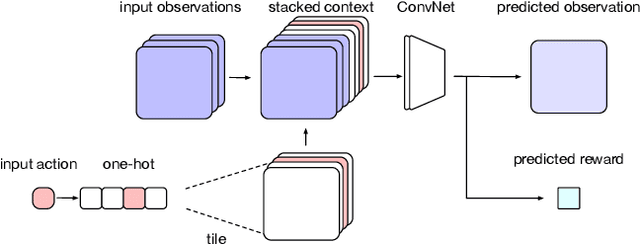
Shaping Belief States with Generative Environment Models for RL
Jun 24, 2019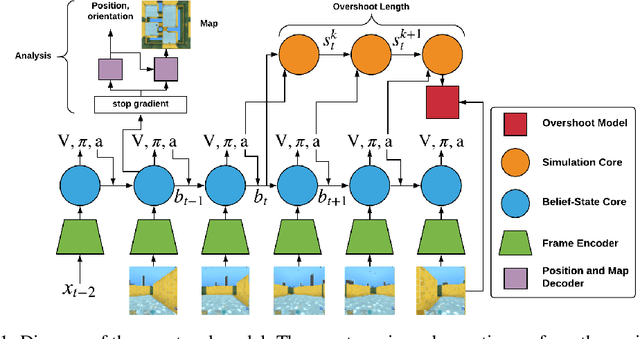
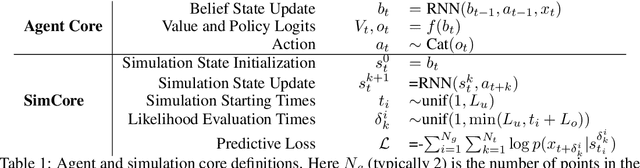

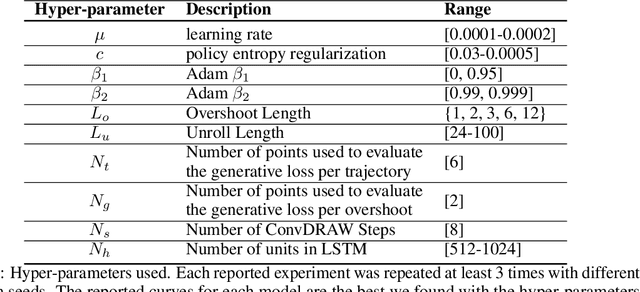
When agents interact with a complex environment, they must form and maintain beliefs about the relevant aspects of that environment. We propose a way to efficiently train expressive generative models in complex environments. We show that a predictive algorithm with an expressive generative model can form stable belief-states in visually rich and dynamic 3D environments. More precisely, we show that the learned representation captures the layout of the environment as well as the position and orientation of the agent. Our experiments show that the model substantially improves data-efficiency on a number of reinforcement learning (RL) tasks compared with strong model-free baseline agents. We find that predicting multiple steps into the future (overshooting), in combination with an expressive generative model, is critical for stable representations to emerge. In practice, using expressive generative models in RL is computationally expensive and we propose a scheme to reduce this computational burden, allowing us to build agents that are competitive with model-free baselines.
A Hierarchical Probabilistic U-Net for Modeling Multi-Scale Ambiguities
May 30, 2019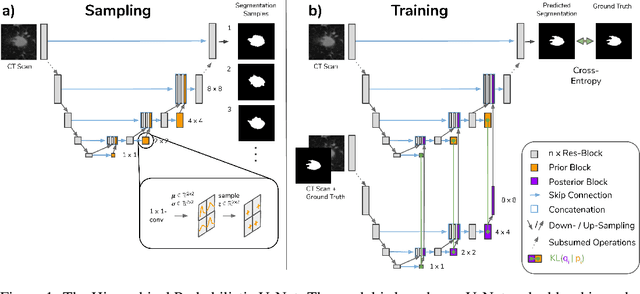
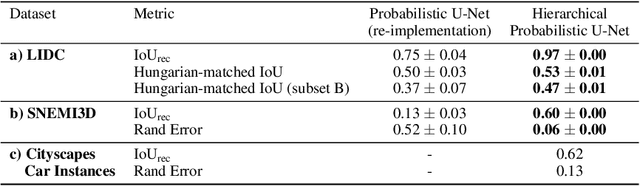
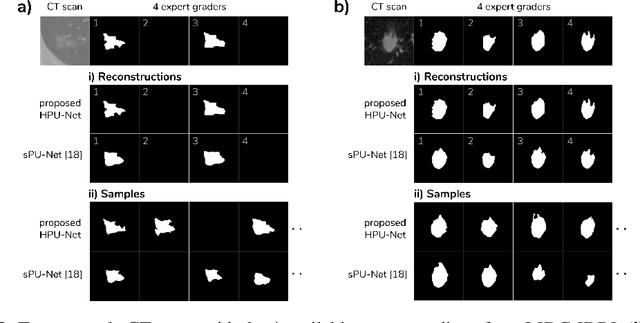

Medical imaging only indirectly measures the molecular identity of the tissue within each voxel, which often produces only ambiguous image evidence for target measures of interest, like semantic segmentation. This diversity and the variations of plausible interpretations are often specific to given image regions and may thus manifest on various scales, spanning all the way from the pixel to the image level. In order to learn a flexible distribution that can account for multiple scales of variations, we propose the Hierarchical Probabilistic U-Net, a segmentation network with a conditional variational auto-encoder (cVAE) that uses a hierarchical latent space decomposition. We show that this model formulation enables sampling and reconstruction of segmenations with high fidelity, i.e. with finely resolved detail, while providing the flexibility to learn complex structured distributions across scales. We demonstrate these abilities on the task of segmenting ambiguous medical scans as well as on instance segmentation of neurobiological and natural images. Our model automatically separates independent factors across scales, an inductive bias that we deem beneficial in structured output prediction tasks beyond segmentation.
A Probabilistic U-Net for Segmentation of Ambiguous Images
Oct 29, 2018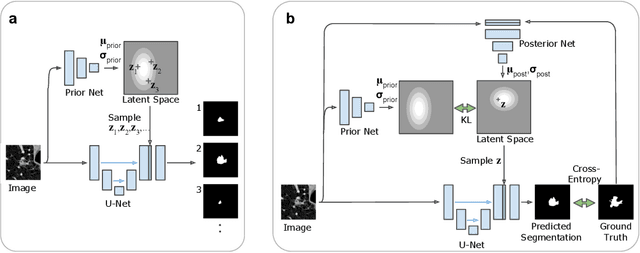

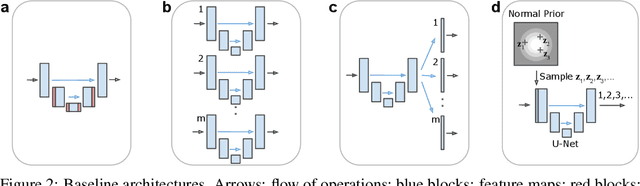
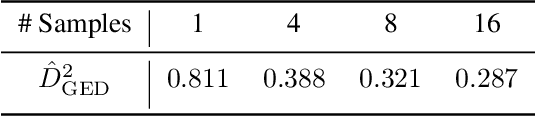
Many real-world vision problems suffer from inherent ambiguities. In clinical applications for example, it might not be clear from a CT scan alone which particular region is cancer tissue. Therefore a group of graders typically produces a set of diverse but plausible segmentations. We consider the task of learning a distribution over segmentations given an input. To this end we propose a generative segmentation model based on a combination of a U-Net with a conditional variational autoencoder that is capable of efficiently producing an unlimited number of plausible hypotheses. We show on a lung abnormalities segmentation task and on a Cityscapes segmentation task that our model reproduces the possible segmentation variants as well as the frequencies with which they occur, doing so significantly better than published approaches. These models could have a high impact in real-world applications, such as being used as clinical decision-making algorithms accounting for multiple plausible semantic segmentation hypotheses to provide possible diagnoses and recommend further actions to resolve the present ambiguities.
Taming VAEs
Oct 01, 2018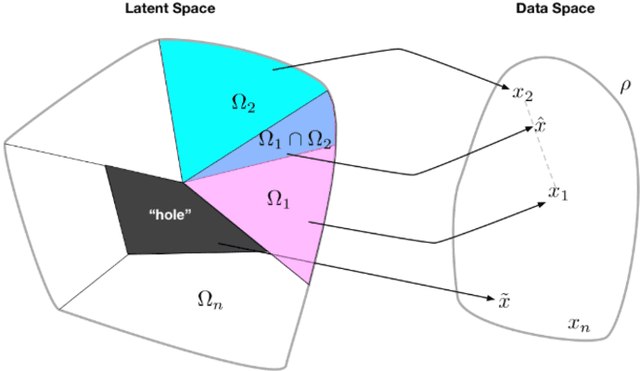

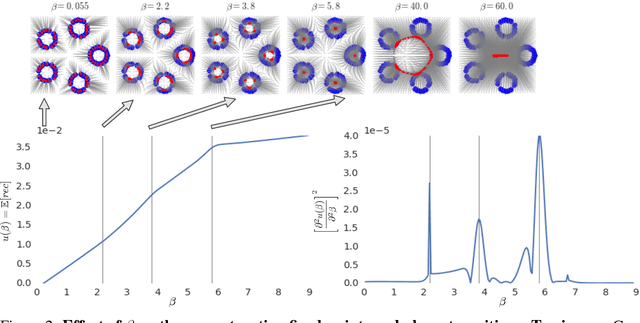

In spite of remarkable progress in deep latent variable generative modeling, training still remains a challenge due to a combination of optimization and generalization issues. In practice, a combination of heuristic algorithms (such as hand-crafted annealing of KL-terms) is often used in order to achieve the desired results, but such solutions are not robust to changes in model architecture or dataset. The best settings can often vary dramatically from one problem to another, which requires doing expensive parameter sweeps for each new case. Here we develop on the idea of training VAEs with additional constraints as a way to control their behaviour. We first present a detailed theoretical analysis of constrained VAEs, expanding our understanding of how these models work. We then introduce and analyze a practical algorithm termed Generalized ELBO with Constrained Optimization, GECO. The main advantage of GECO for the machine learning practitioner is a more intuitive, yet principled, process of tuning the loss. This involves defining of a set of constraints, which typically have an explicit relation to the desired model performance, in contrast to tweaking abstract hyper-parameters which implicitly affect the model behavior. Encouraging experimental results in several standard datasets indicate that GECO is a very robust and effective tool to balance reconstruction and compression constraints.
Generative Temporal Models with Spatial Memory for Partially Observed Environments
Jul 19, 2018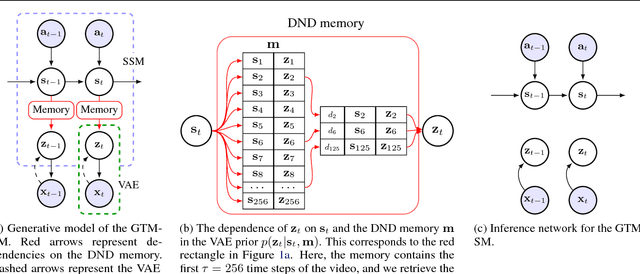

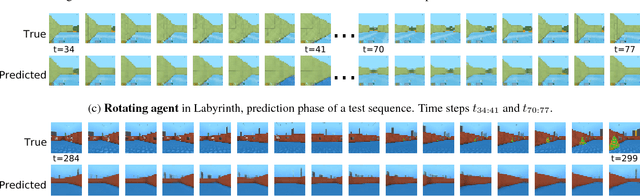

In model-based reinforcement learning, generative and temporal models of environments can be leveraged to boost agent performance, either by tuning the agent's representations during training or via use as part of an explicit planning mechanism. However, their application in practice has been limited to simplistic environments, due to the difficulty of training such models in larger, potentially partially-observed and 3D environments. In this work we introduce a novel action-conditioned generative model of such challenging environments. The model features a non-parametric spatial memory system in which we store learned, disentangled representations of the environment. Low-dimensional spatial updates are computed using a state-space model that makes use of knowledge on the prior dynamics of the moving agent, and high-dimensional visual observations are modelled with a Variational Auto-Encoder. The result is a scalable architecture capable of performing coherent predictions over hundreds of time steps across a range of partially observed 2D and 3D environments.
Unsupervised Learning of 3D Structure from Images
Jun 19, 2018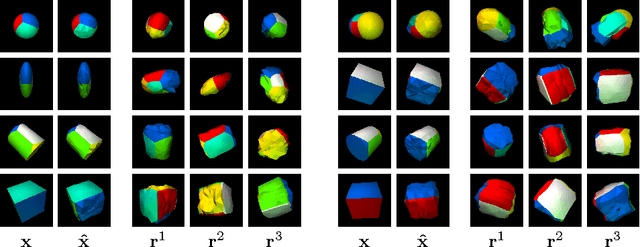
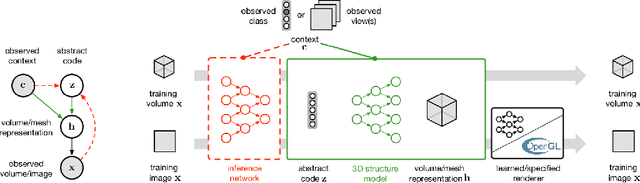

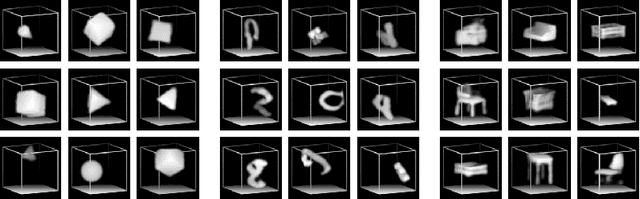
A key goal of computer vision is to recover the underlying 3D structure from 2D observations of the world. In this paper we learn strong deep generative models of 3D structures, and recover these structures from 3D and 2D images via probabilistic inference. We demonstrate high-quality samples and report log-likelihoods on several datasets, including ShapeNet [2], and establish the first benchmarks in the literature. We also show how these models and their inference networks can be trained end-to-end from 2D images. This demonstrates for the first time the feasibility of learning to infer 3D representations of the world in a purely unsupervised manner.
Imagination-Augmented Agents for Deep Reinforcement Learning
Feb 14, 2018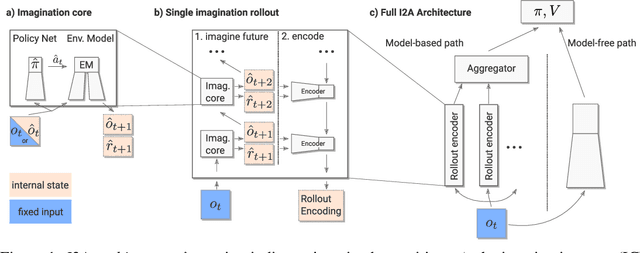


We introduce Imagination-Augmented Agents (I2As), a novel architecture for deep reinforcement learning combining model-free and model-based aspects. In contrast to most existing model-based reinforcement learning and planning methods, which prescribe how a model should be used to arrive at a policy, I2As learn to interpret predictions from a learned environment model to construct implicit plans in arbitrary ways, by using the predictions as additional context in deep policy networks. I2As show improved data efficiency, performance, and robustness to model misspecification compared to several baselines.