 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAamir Ahmad
SmartMocap: Joint Estimation of Human and Camera Motion using Uncalibrated RGB Cameras
Sep 28, 2022

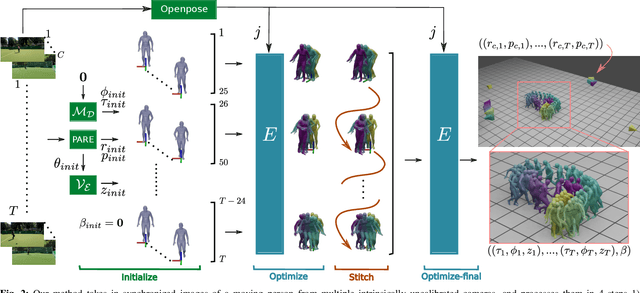
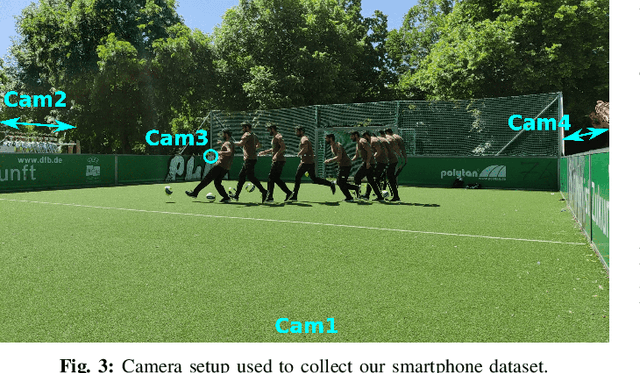
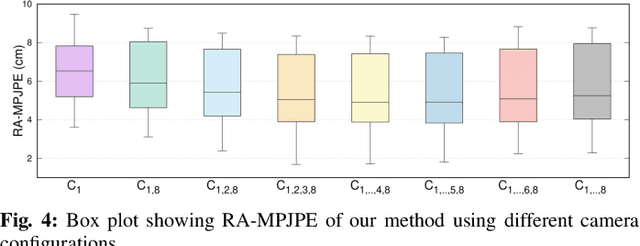
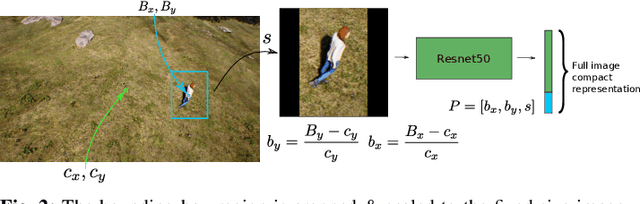
Markerless human motion capture (mocap) from multiple RGB cameras is a widely studied problem. Existing methods either need calibrated cameras or calibrate them relative to a static camera, which acts as the reference frame for the mocap system. The calibration step has to be done a priori for every capture session, which is a tedious process, and re-calibration is required whenever cameras are intentionally or accidentally moved. In this paper, we propose a mocap method which uses multiple static and moving extrinsically uncalibrated RGB cameras. The key components of our method are as follows. First, since the cameras and the subject can move freely, we select the ground plane as a common reference to represent both the body and the camera motions unlike existing methods which represent bodies in the camera coordinate. Second, we learn a probability distribution of short human motion sequences ($\sim$1sec) relative to the ground plane and leverage it to disambiguate between the camera and human motion. Third, we use this distribution as a motion prior in a novel multi-stage optimization approach to fit the SMPL human body model and the camera poses to the human body keypoints on the images. Finally, we show that our method can work on a variety of datasets ranging from aerial cameras to smartphones. It also gives more accurate results compared to the state-of-the-art on the task of monocular human mocap with a static camera. Our code is available for research purposes on https://github.com/robot-perception-group/SmartMocap.
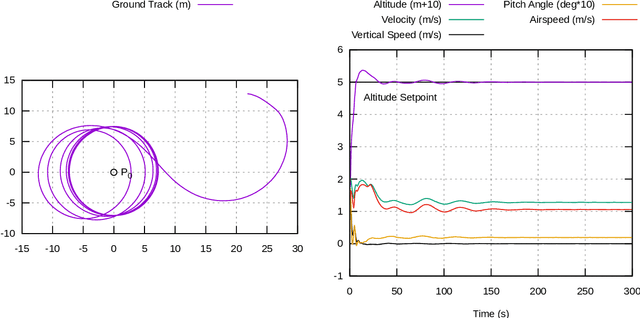
Perception-driven Formation Control of Airships
Sep 26, 2022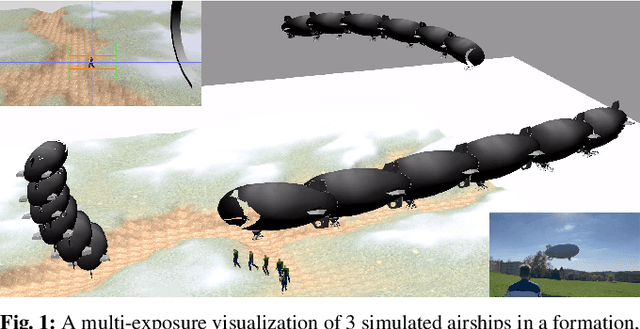
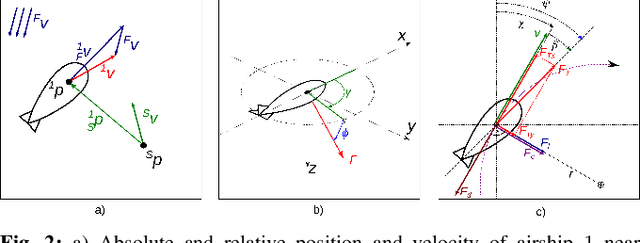
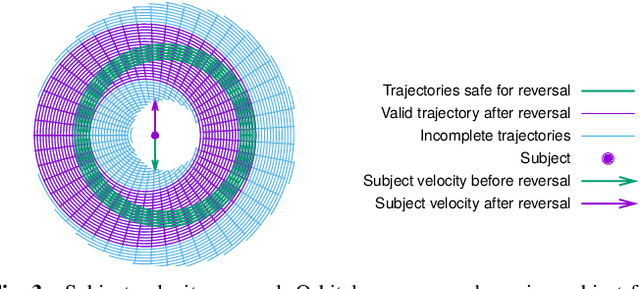
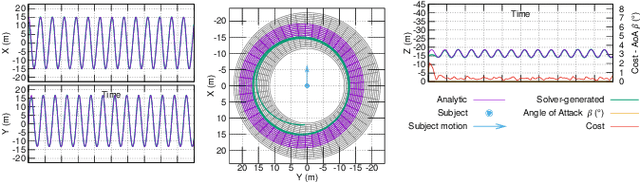
For tracking and motion capture (MoCap) of animals in their natural habitat, a formation of safe and silent aerial platforms, such as airships with on-board cameras, is well suited. However, unlike multi-rotors, airships are severely motion constrained and affected by ambient wind. Their orientation and flight direction are also tightly coupled. Therefore, state-of-the-art MPC-based formation control methods for perception tasks are not directly applicable for a team of airships. In this paper, we address this problem by first exploiting a periodic relationship between the airspeed of an airship and its distance to the subject. We use it to derive analytical and numeric solutions that satisfy the MoCap perception constraints. Based on this, we develop an MPC-based formation controller. We performed detailed analysis of our solution, including the effects of changing physical parameters (like angle of attack and pitch angle) on it. Extensive simulation experiments, comparing results for different formation sizes, different wind conditions and various subject speeds, are presented. A demonstration of our method on a real airship is also included. We have released all of our source code at https://github.com/robot-perception-group/Airship-MPC. A video describing our approach and results can be watched at https://youtu.be/ihS0_VRD_kk
Deep Residual Reinforcement Learning based Autonomous Blimp Control
Mar 10, 2022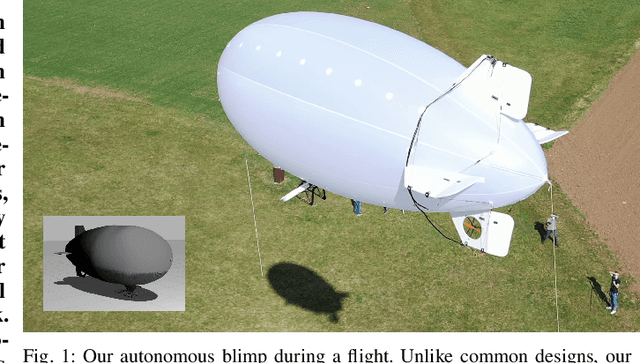
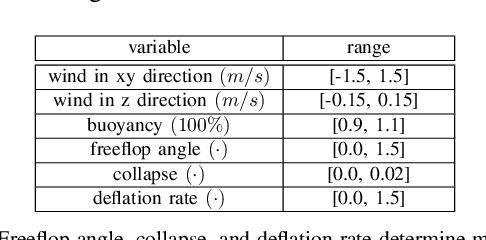
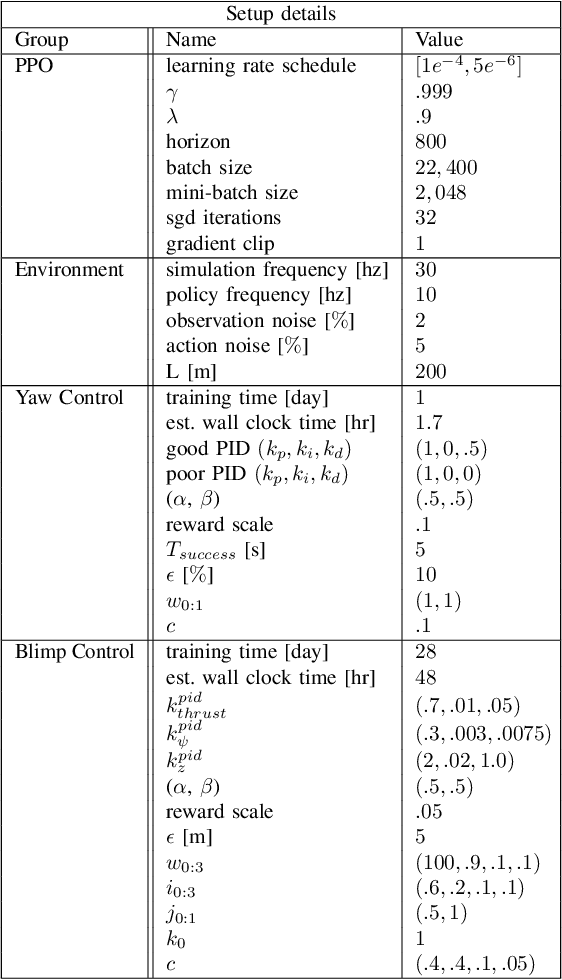
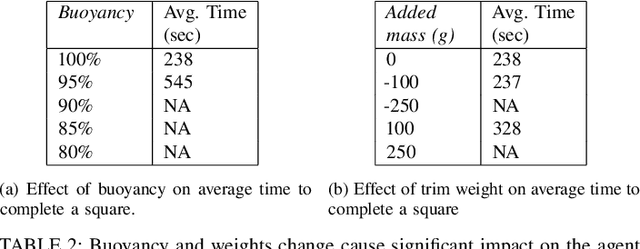
Blimps are well suited to perform long-duration aerial tasks as they are energy efficient, relatively silent and safe. To address the blimp navigation and control task, in previous work we developed a hardware and software-in-the-loop framework and a PID-based controller for large blimps in the presence of wind disturbance. However, blimps have a deformable structure and their dynamics are inherently non-linear and time-delayed, making PID controllers difficult to tune. Thus, often resulting in large tracking errors. Moreover, the buoyancy of a blimp is constantly changing due to variations in ambient temperature and pressure. To address these issues, in this paper we present a learning-based framework based on deep residual reinforcement learning (DRRL), for the blimp control task. Within this framework, we first employ a PID controller to provide baseline performance. Subsequently, the DRRL agent learns to modify the PID decisions by interaction with the environment. We demonstrate in simulation that DRRL agent consistently improves the PID performance. Through rigorous simulation experiments, we show that the agent is robust to changes in wind speed and buoyancy. In real-world experiments, we demonstrate that the agent, trained only in simulation, is sufficiently robust to control an actual blimp in windy conditions. We openly provide the source code of our approach at https://github.com/ robot-perception-group/AutonomousBlimpDRL.
AirPose: Multi-View Fusion Network for Aerial 3D Human Pose and Shape Estimation
Jan 20, 2022

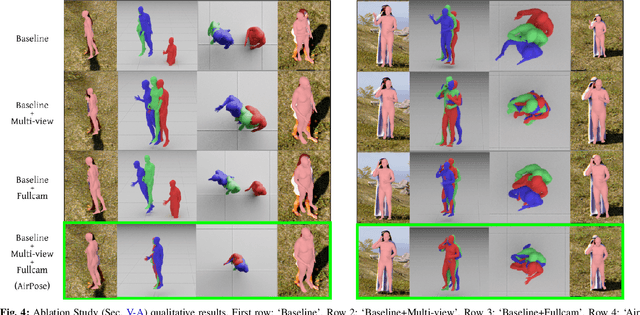
In this letter, we present a novel markerless 3D human motion capture (MoCap) system for unstructured, outdoor environments that uses a team of autonomous unmanned aerial vehicles (UAVs) with on-board RGB cameras and computation. Existing methods are limited by calibrated cameras and off-line processing. Thus, we present the first method (AirPose) to estimate human pose and shape using images captured by multiple extrinsically uncalibrated flying cameras. AirPose itself calibrates the cameras relative to the person instead of relying on any pre-calibration. It uses distributed neural networks running on each UAV that communicate viewpoint-independent information with each other about the person (i.e., their 3D shape and articulated pose). The person's shape and pose are parameterized using the SMPL-X body model, resulting in a compact representation, that minimizes communication between the UAVs. The network is trained using synthetic images of realistic virtual environments, and fine-tuned on a small set of real images. We also introduce an optimization-based post-processing method (AirPose$^{+}$) for offline applications that require higher MoCap quality. We make our method's code and data available for research at https://github.com/robot-perception-group/AirPose. A video describing the approach and results is available at https://youtu.be/xLYe1TNHsfs.
Autonomous Blimp Control using Deep Reinforcement Learning
Sep 27, 2021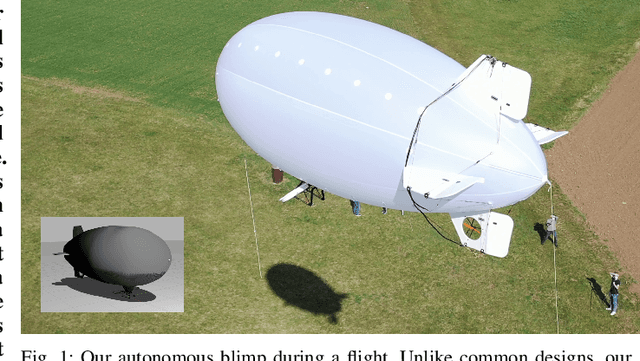
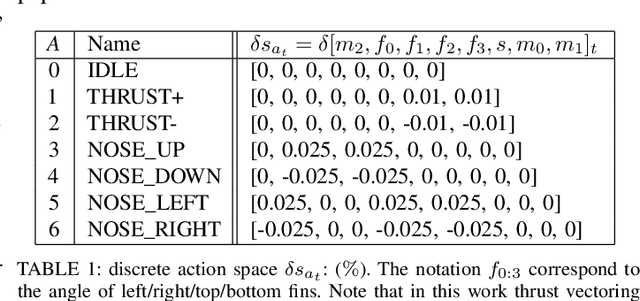
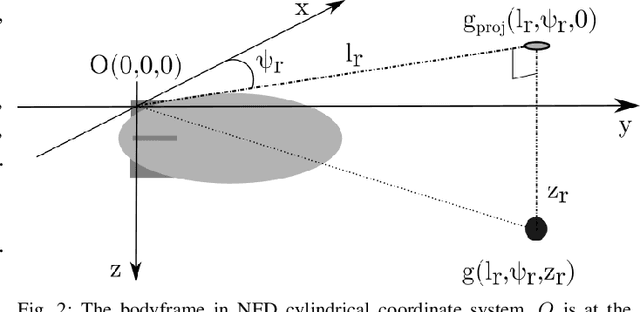
Aerial robot solutions are becoming ubiquitous for an increasing number of tasks. Among the various types of aerial robots, blimps are very well suited to perform long-duration tasks while being energy efficient, relatively silent and safe. To address the blimp navigation and control task, in our recent work, we have developed a software-in-the-loop simulation and a PID-based controller for large blimps in the presence of wind disturbance. However, blimps have a deformable structure and their dynamics are inherently non-linear and time-delayed, often resulting in large trajectory tracking errors. Moreover, the buoyancy of a blimp is constantly changing due to changes in the ambient temperature and pressure. In the present paper, we explore a deep reinforcement learning (DRL) approach to address these issues. We train only in simulation, while keeping conditions as close as possible to the real-world scenario. We derive a compact state representation to reduce the training time and a discrete action space to enforce control smoothness. Our initial results in simulation show a significant potential of DRL in solving the blimp control task and robustness against moderate wind and parameter uncertainty. Extensive experiments are presented to study the robustness of our approach. We also openly provide the source code of our approach.
Active Visual SLAM with independently rotating camera
May 19, 2021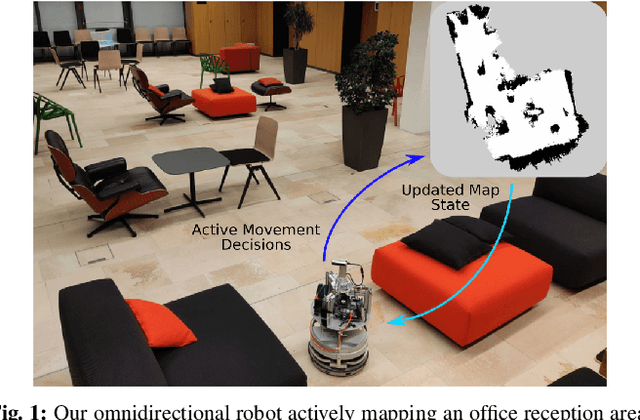
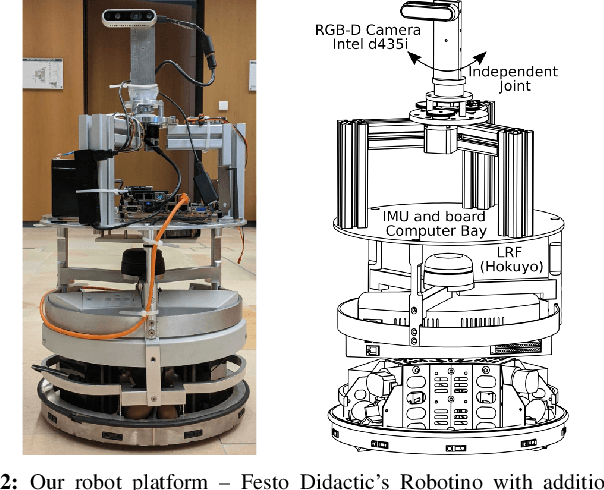
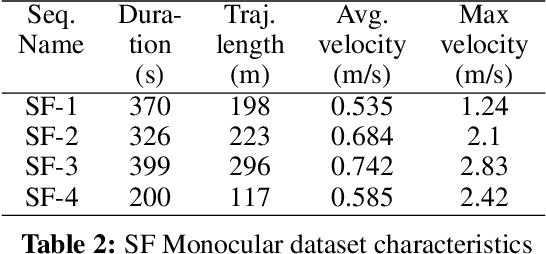
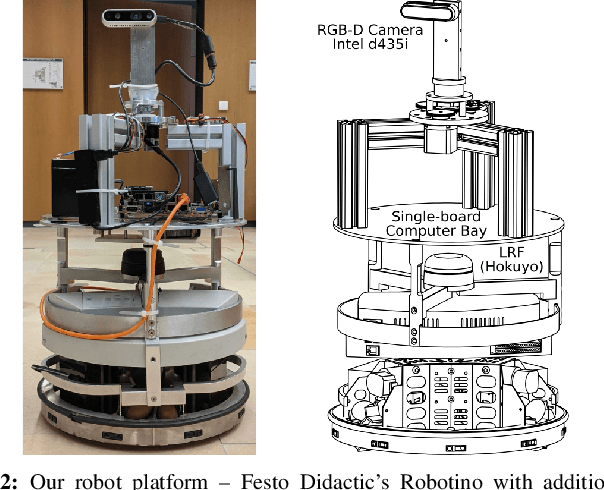
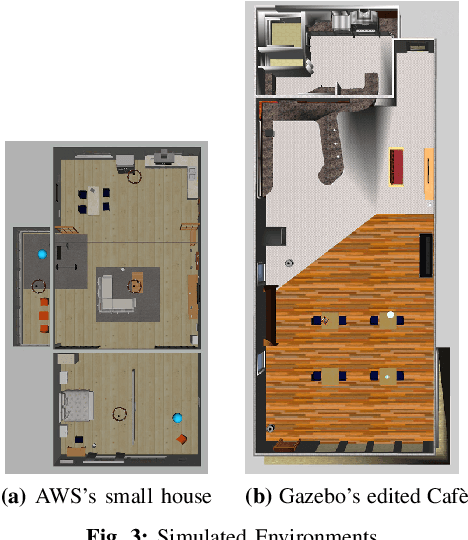
In active Visual-SLAM (V-SLAM), a robot relies on the information retrieved by its cameras to control its own movements for autonomous mapping of the environment. Cameras are usually statically linked to the robot's body, limiting the extra degrees of freedom for visual information acquisition. In this work, we overcome the aforementioned problem by introducing and leveraging an independently rotating camera on the robot base. This enables us to continuously control the heading of the camera, obtaining the desired optimal orientation for active V-SLAM, without rotating the robot itself. However, this additional degree of freedom introduces additional estimation uncertainties, which need to be accounted for. We do this by extending our robot's state estimate to include the camera state and jointly estimate the uncertainties. We develop our method based on a state-of-the-art active V-SLAM approach for omnidirectional robots, and evaluate it through rigorous simulation and real robot experiments. We obtain more accurate maps, with lower energy consumption, while maintaining the benefits of the active approach with respect to the baseline. We also demonstrate how our method easily generalizes to other non-omnidirectional robotic platforms, which was a limitation of the previous approach. Code and implementation details are provided as open-source.
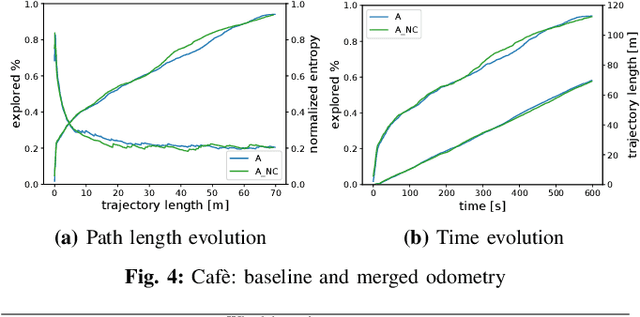
Collaborative Mapping of Archaeological Sites using multiple UAVs
May 17, 2021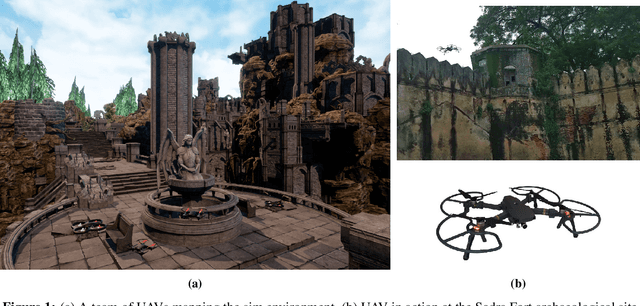
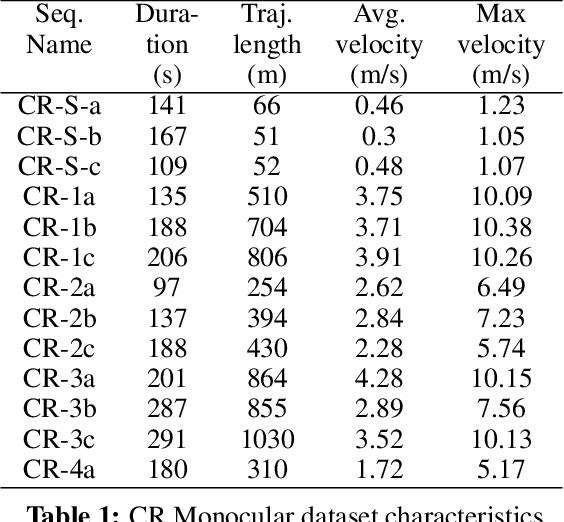
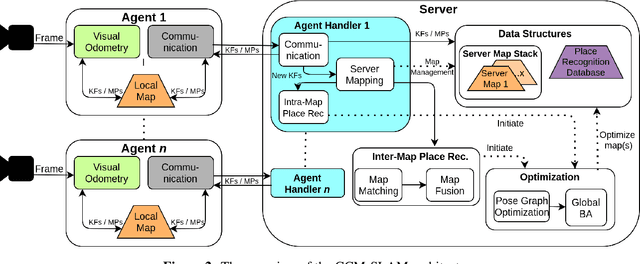
UAVs have found an important application in archaeological mapping. Majority of the existing methods employ an offline method to process the data collected from an archaeological site. They are time-consuming and computationally expensive. In this paper, we present a multi-UAV approach for faster mapping of archaeological sites. Employing a team of UAVs not only reduces the mapping time by distribution of coverage area, but also improves the map accuracy by exchange of information. Through extensive experiments in a realistic simulation (AirSim), we demonstrate the advantages of using a collaborative mapping approach. We then create the first 3D map of the Sadra Fort, a 15th Century Fort located in Gujarat, India using our proposed method. Additionally, we present two novel archaeological datasets recorded in both simulation and real-world to facilitate research on collaborative archaeological mapping. For the benefit of the community, we make the AirSim simulation environment, as well as the datasets publicly available.
iRotate: Active Visual SLAM for Omnidirectional Robots
Mar 22, 2021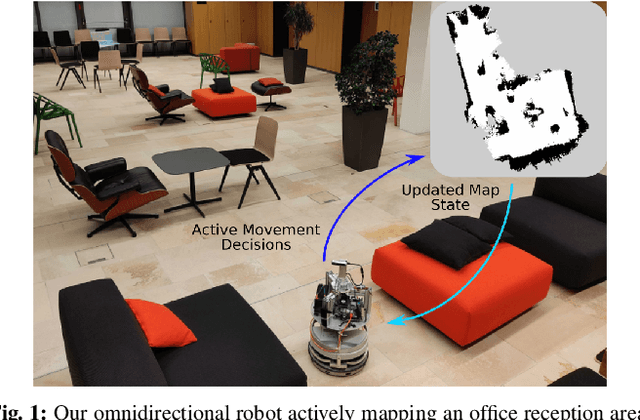
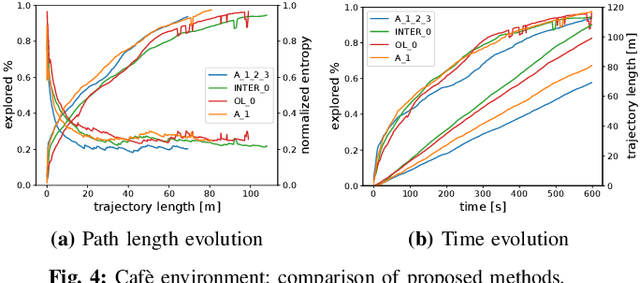
In this letter, we present an active visual SLAM approach for omnidirectional robots. The goal is to generate control commands that allow such a robot to simultaneously localize itself and map an unknown environment while maximizing the amount of information gained and consume as little energy as possible. Leveraging the robot's independent translation and rotation control, we introduce a multi-layered approach for active V-SLAM. The top layer decides on informative goal locations and generates highly informative paths to them. The second and third layers actively re-plan and execute the path, exploiting the continuously updated map. Moreover, they allow the robot to maximize its visibility of 3D visual features in the environment. Through rigorous simulations, real robot experiments and comparisons with the state-of-the-art methods, we demonstrate that our approach achieves similar coverage and lesser overall map entropy while keeping the traversed distance up to 36% less than the other methods. Code and implementation details are provided as open-source.
Simulation and Control of Deformable Autonomous Airships in Turbulent Wind
Dec 31, 2020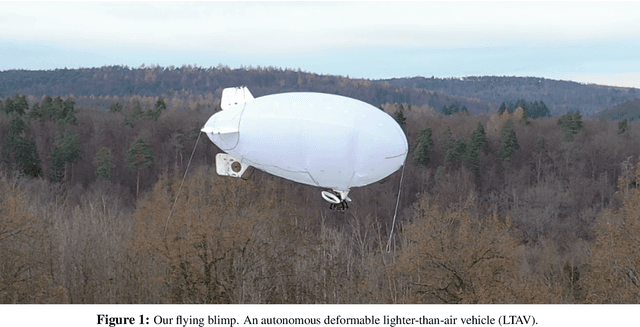
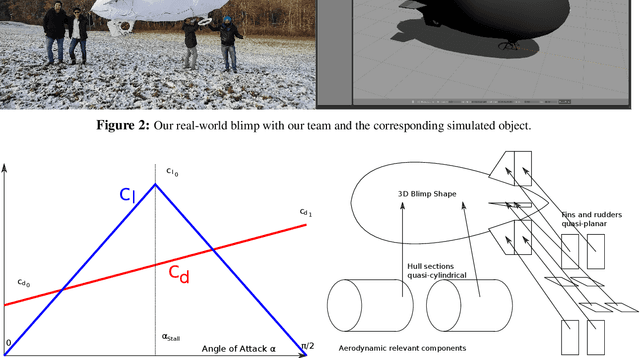
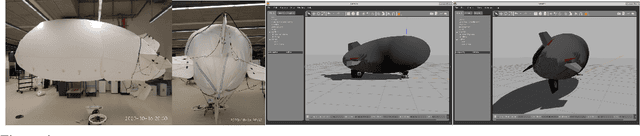
Abstract. Fixed wing and multirotor UAVs are common in the field of robotics. Solutions for simulation and control of these vehicles are ubiquitous. This is not the case for airships, a simulation of which needs to address unique properties, i) dynamic deformation in response to aerodynamic and control forces, ii) high susceptibility to wind and turbulence at low airspeed, iii) high variability in airship designs regarding placement, direction and vectoring of thrusters and control surfaces. We present a flexible framework for modeling, simulation and control of airships, based on the Robot operating system (ROS), simulation environment (Gazebo) and commercial off the shelf (COTS) electronics, both of which are open source. Based on simulated wind and deformation, we predict substantial effects on controllability, verified in real world flight experiments. All our code is shared as open source, for the benefit of the community and to facilitate lighter-than-air vehicle (LTAV) research. https://github.com/robot-perception-group/airship_simulation